In this method a proportional damping matrix is defined as:(1)
Where, and are the pre-defined constants. In modal analysis, the use of a
proportional damping matrix allows to reduce the global equilibrium equation to n-uncoupled
equations by using an orthogonal transformation.
If the global equilibrium equation is expressed as:(2)
The transformed uncoupled system of equations can be written as:(3)
With (4)
Each uncoupled equation is written as:(5)
With (6)
Where,
The ith natural frequency of the system
The ith damping ratio
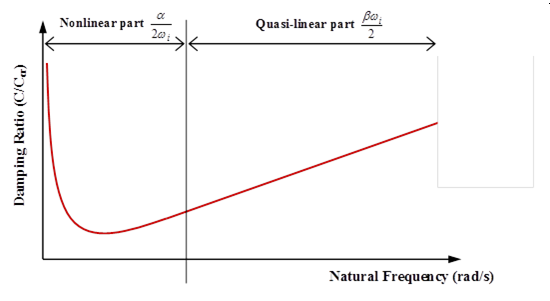
This leads to a system of equations with two unknown variables and . Regarding to the range of the dominant frequencies of system, two
frequencies are chosen. Using the pair of the most significant frequencies, two equations
with two unknown variables can be resolved to obtain values for and . For high frequencies the role of is more significant. However, for lower frequencies plays an important role (図 1). 図 1. Rayleigh Damping Variation for Natural Frequencies
The Rayleigh damping method applied to explicit time-integration method leads to the
following equations:(7)
With (8)
(9)
(10)
Neglecting and , in evaluation you have:(11)
And finally:(12)
(13)
(14)
The three approaches available in Radioss are Dynamic
Relaxation (/DYREL), Energy Discrete Relaxation
(/KEREL) and Rayleigh Damping (/DAMP). Refer to
Example Guide for application examples.
The loading is applied at a rate sufficiently slow to minimize the dynamic effects. The
final solution is obtained by smoothing the curves.
In case of elasto-plastic problems, one must minimize dynamic overshooting because of the
irreversibility of the plastic flow.