Kinematic Conditions
Warning ID 147.
WARNING ID: 147 *** WARNING: INCOMPATIBLE KINEMATIC CONDITIONS 2 KINEMATIC CONDITIONS ON NODE
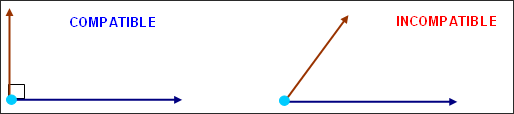
Figure 1. Conditions upon Node Velocity
Two kinematic conditions which apply at the same time along non-orthogonal directions are considered incompatible.
For instance, a boundary constraint on a node in X direction of the global system and an imposed velocity in the same direction are not compatible (such a behavior is not possible). On the other hand, a boundary constraint on a node in X direction of the global system and an imposed velocity in Y or Z direction of the global system are compatible.
Since a rigid body controls the movement of its secondary nodes, a rigid body secondary node can not use another condition (specifically it cannot belong to another rigid body).
If flag Ikrem of the rigid body gets its default value =0, the secondary nodes of the rigid body are automatically suppressed of the rigid walls; the main node of the rigid body will realize the contact with the rigid walls if it is declared as a secondary node of the rigid walls.
In case some conditions are incompatible and are applied at the same time on a node, the model behavior is not guaranteed, since those conditions will not be correctly taken into account. The /PARITH/ON option is not supported in this case, so it is necessary to check the source of those WARNINGS and to adapt the model.
In case of two incompatible conditions that are never applied at the same time (for instance, because their activation intervals [Tstart, Tstop] do not overlap); the WARNINGS need not be taken into account.
Moreover, no error is written by Radioss Starter better than these WARNINGS, which would prevent from running the computation, since the analysis of the compatibility of the kinematic conditions is sometimes more complex than Radioss Starter can manage. In such cases, the WARNINGS provide the only clue to error termination of the run and it is your responsibility to check the model.
Main node of rigid body.
Why is it recommended not to set a node of the mesh as the main node of a rigid body?
- The local system of the main node is not compatible with options imposing rotations (except boundary conditions and imposed velocities). If some elements having a rotational stiffness are connected (such as beams, some springs and shells), an incompatibility occurs.
- Depending on the flag ICoG, which is used in the rigid body definition, a lot of mass and inertia can be added locally onto the node; as well as the node can be moved to the center of mass of the rigid body.
Error of “RIGID BODY UNSTABLE".
**ERROR: RIGID BODY 345886 UNSTABLE
- Rotational velocity of the rigid body
- Time step
The rigid body turns more than one radian per cycle. This situation is due to divergence in the computation. The model and its behavior must be checked.
Warning ID 345 and Warning ID 86.
WARNING ID: 345 *** WARNING/CHECK TIED INTERFACE 93836629 1218 601311 601309 601310 601312 1.0218 -0.0095 1.339E-01
- This message is written for Interface TYPE2 using the search formulation for the
closest main segment Isearch =2 (the default value for this
flag as of Radioss
V4.1).
93836629 1218 601311 601309 601310 601312 1.0218 -0.0095 1.339E-01 # S Seg M1 M2 M3 M4 r s hWhere,- S
- Identifier of the secondary node which is concerned.
- Seg
- Number (identifier) of the main segment.
- M1, M2, M3, M4
- Identifiers of the nodes defining the main segment
- r, s
- Iso parametric coordinates of the secondary node projection onto the main segment: the node projects inside the segment if -1 ≤ r ≤ 1 and -1 ≤ s ≤ 1.
- h
- Height of the secondary node with respect to the main segment.
This message is written when the value of r or the value of s is not between -1 and 1, that is to say that the secondary node projects out of the closest main segment.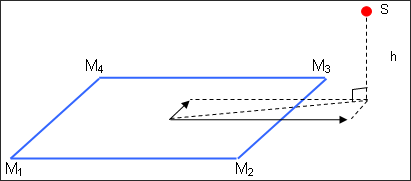
Figure 2.This message is not due to the height of the secondary node with respect to the main segment.
In case the Interface TYPE2 with Spotflag =0, this can cause an error in Radioss Engine at the first cycle, due to a negative mass or inertia of a main node of the segment. This can also cause an error in Radioss Engine during the run due to a negative stiffness on a main node of the segment:** ERROR : NEGATIVE STIFFNESS NODE …
In case of the Interface TYPE2 with Spotflag =1, the situation corresponding to this message can cause a relatively important added mass at the first cycle on the main nodes of the segment.
- In case of the following message:
WARNING ID: 86 ** WARNING: TIED INTERFACE TIED INTERFACE: 4533 5490 248 5430 5250 5490 5491 1.00734 1.14868
This message corresponds to search formulation for the closest main segment Isearch =1.
The meaning and possible consequences of this message are the same as for WARNING ID: 345.
Added mass in tied contact.
Why is there an added mass on nodes of main segments of interfaces TYPE2?
If option Spotflag =1 is used in the Interface TYPE2, then there are added mass on main nodes at the first cycle of Radioss Engine. Indeed the secondary node inertia with respect to the center of the closest main segment – let IS + mSd2.
- IS
- Secondary node inertia
- mS
- Mass
- d
- Distance to the center of the segment - is equilibrated by added mass on main nodes.
When creating a spot weld with spring and Interface TYPE2, it is important to check that the springs inertia (I =m*L2) are not too large - that is to say, that they correspond to the physics – and that the secondary nodes height with respect to the main segments is as small as possible.
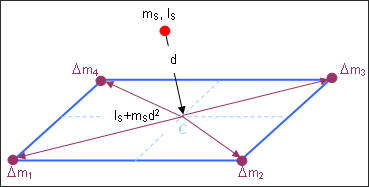
Figure 3.
Warning ID 547.
WARNING ID: 547 ** WARNING IN RIGID BODY DEFINITION NODE ID= 167467 IS MAIN OF RIGID BODY NUMBER 25 AND SECONDARY OF ANOTHER ONE
The standard formulation for rigid bodies is not working if a main node of a rigid body appears as a secondary node of another rigid body; except for rigid bodies using Lagrange multipliers (/RBODY/LAGMUL).
In the figure below, three rigid bodies A, B and C are defined. The main nodes of A and B have an added mass so that the centers of mass of the rigid bodies A and B are not centered.
For representing the rigid body motion of the whole system A+B, a rigid body C has been defined using all secondary nodes of A and B and also including the main nodes of A and B in order to take into account the added mass on these main nodes.
Then the message is written by Radioss Starter and the rigid bodies A, B and C absolutely cannot be used at the same time (the results would be arbitrary).
On the other hand, we can stand from the same Runname_0000.rad to study the whole system C=A+B rigid body motion by deactivating rigid bodies A and B (/RBODY/OFF) and activating rigid body C (/RBODY/ON), whether the independent behaviors of A and B by activating rigid bodies A and B (/RBODY/ON) and deactivating rigid body C (/RBODY/OFF).
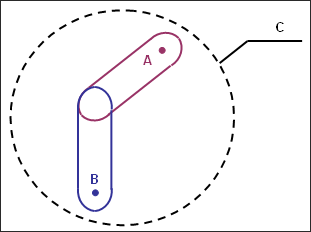
Figure 4.