What's New
View new features for MotionSolve 2022.1.
Altair Multi Body Solutions 2022.1 Release Notes
Highlights
- Flexbody Contact
- Entity Editor
- New Run Workflow
- Support for GPSTRESS
- Limited Multi-Threading
- CVT for Scooters
- Aerodynamics for Two-wheelers
- Slalom Events
- Tire Soft-Soil Obstacles
- Altair Driver Steering Control Using Torque
More details about these features, additional enhancements, and resolved issues are described below.
New Features
- Flexbody Contact
- MotionSolve supports 2D or 3D contact force between two bodies. In
previous releases, MotionSolve only supported contact for rigid bodies.
With this release, contact has been extended to CMS-based flexible
bodies. Whenever any rigid or flexible geometry on the first body
penetrates any rigid or flexible geometry on the second body, contact
normal and frictional forces are generated. The normal force tends to
repulse motion along the common normal at the contact point. The
frictional force tends to oppose relative sliding velocity at the
contact point. The contact force vanishes when the geometries no longer
intersect. New processes have been defined to account for flexbody deformation involving loads generated from general part-to-part contact or loads occurring around joint region. Those processes have been integrated into the flexible preparation tool FlexPrep.
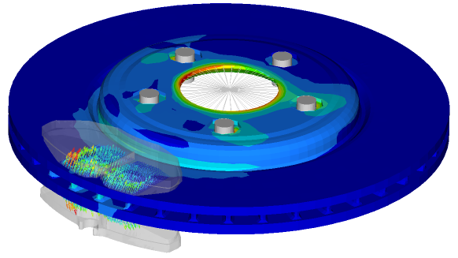 Figure 1.
Figure 1. - Entity Editor
- MotionView’s new interface comes with an Entity Editor that lists the
entity properties to edit. In addition to what was available in 2022,
for 2022.1, the following entities now have an editor:
- Points, Bodies, Rigid Group, Markers, and Graphics
- Joints, Bushings, Spring Dampers, and Forces
- Couplers, Gears, Advanced Joints, and Contacts
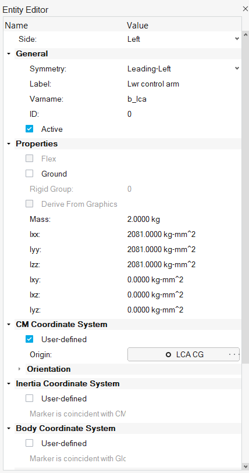 Figure 2.
Figure 2. - New Run Workflow
- The new MotionView interface has an improved workflow for solving the
model through MotionSolve. The solution is carried through a live
connection to the solver through its msolve Python APIs. The new
workflow offers:
- Animation of the solution live as it progresses.
- Run status progress bar.
- Run history – Lists all runs submitted through the live process.
- Load results in HyperView and HyperGraph for detailed post-processing.
From the Analyze ribbon, select the Run tool.
- Support for GPSTRESS
- If the system contains a flexible body made of shell or solid elements,
the stresses of that body are usually evaluated by either printing or
contour plotting the element component stresses. However, element
stresses are calculated at the center and vertices of the elements. This
might not always be sufficient in cases where more accurate stress
values at the grid points are required. The grid point stress (GPSTRESS)
option in Altair OptiStruct offers you an alternative. GPSTRESS
calculates the stresses at the grid points from the adjoining shell and
solid elements.
For CMS based flexible bodies, MotionSolve supports the calculation of stresses on the grid points if the FlexH3D file contains grid point stress mode shapes. Grid point stresses must be explicitly requested in OptiStruct during the CMS analysis. The grid point stresses can be requested in the H3DOutput command statement (solver only). This option will be soon added to MotionView.
- Limited Multi-Threading
- The dynamic simulation in MotionSolve accounts for all the accelerations
(linear, angular, centrifugal, and Coriolis), forces, and constraints.
In other words, it solves the equations of motion in their most general
form, including nonlinear effects. This enables you to develop accurate
system level simulations of complex mechanical systems. At the core of most analyses, MotionSolve is solving a set of linear equations (A x = b). By default, a direct LU solver is utilized that is very robust and fast, but modest for parallel computation. Tests showed that most multi body models in MotionSolve perform best if up to four parallel threads are assigned. However, some models might benefit from more threads. By default, MotionSolve is now limited to four threads (nt=4), but the limit can be increased using the “nt” option.Note: A larger number for "nt" checks out more Altair Units for a single MotionSolve run. Please refer to the Altair Units Licensing documentation for more information on the solver unit draw.Note:
- CVT for Scooters
- The Two-Wheeler Library in MotionView includes a CVT (Continuously
Variable Transmission) Powertrain for Scooter models. The Altair CVT
Powertrain is a mathematical formulation that represents an automobile
IC engine powertrain with CVT in the form of Control State Equations
(CSE).
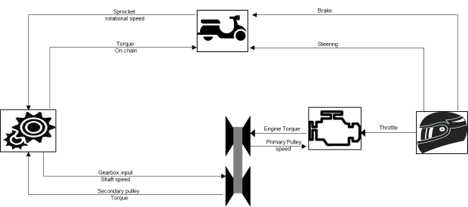 Figure 3. The CVT Powertrain can be included in the Full Scooter with Driver assembly model under the Two-wheeler assembly wizard library. With the possibility to design and control the parameters of the CVT Powertrain, this feature expands the capability of scooters modeling in MotionView, enabling a wide range of design evaluations and vehicle performance simulations.
Figure 3. The CVT Powertrain can be included in the Full Scooter with Driver assembly model under the Two-wheeler assembly wizard library. With the possibility to design and control the parameters of the CVT Powertrain, this feature expands the capability of scooters modeling in MotionView, enabling a wide range of design evaluations and vehicle performance simulations.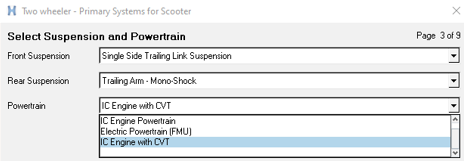 Figure 4.
Figure 4. - Aerodynamics for Two-wheelers
- MotionView adds the option to include Aerodynamic Forces in motorcycle
and scooter models. The option is available in the Two-wheeler assembly
wizard library.
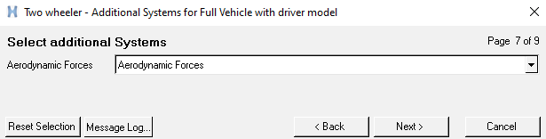 Figure 5.
Figure 5. The aerodynamic parameters are entered in a Teim Orbit property file, *.aae, including environment parameter, wind velocity, side forces, drag, lift, yaw, and roll coefficients.
- Slalom Event
- MotionView contains an event to evaluate the performance of vehicles in
a slalom maneuver. The Slalom Event drives the vehicle in a sequence of
turns around cones in alternate directions measuring the vehicle state
variables, tire forces, suspension behavior, and other performance
indicators.
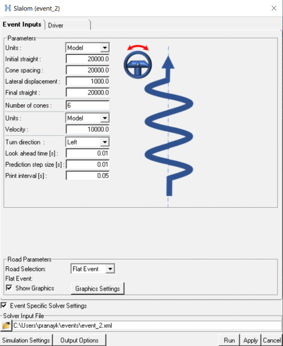 Figure 6.
Figure 6. The Slalom Event is available for two-wheeler, car, and truck models using the Altair Driver. An automated Report template is available to simplify the post-processing of the simulation event containing the main output result plots.
- Tire Soft Soil Obstacles
- In the previous release, MotionView/MotionSolve included a new empirical
tire model for soft soil interaction to study the dynamic behavior of
vehicles traversing a compressible surface. The soil surface was
essentially flat, and an additional graphic was implemented to visualize
the tire sinking into the soft ground in the post-processing using
HyperView.
In this release, MotionView/MotionSolve enables the addition of obstacles to represent the compressible surface. A total of nine different obstacles can be included in the road property file: Rectangular, Circular, Bump, Ramp, Roof, Sine, Sine-sweep, Plank obstacle, and Crown obstacle.
The obstacles can be represented as soft soil with the same or a different surface material, or as a rigid obstacle. Figure 7. Note: The graphic used to visualize the soft-soil road can capture the obstacle's information only when the tire reaches its location. Rigid obstacles cannot be visualized in the post-processing graphic. This is a known issue that will be fixed in a future release.
Figure 7. Note: The graphic used to visualize the soft-soil road can capture the obstacle's information only when the tire reaches its location. Rigid obstacles cannot be visualized in the post-processing graphic. This is a known issue that will be fixed in a future release. - Altair Driver Steering Control Using Torque
- In vehicles using leaning control (two-wheelers and three-wheelers), it
is now possible to perform the steering control using motion or torque.
The steering control using torque enables a smooth response of the
system. The selection of the steering control type is done in the Event
Editor under the Driver properties tab; the default selection is set the
Motion.
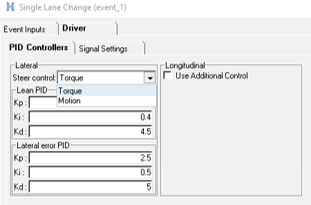 Figure 8. Note: The Steer Angle and Torque output request available in the Front suspension system of the Library models reports zero torque when the Steer Control type is set to Torque. For plotting steer torque in this case, it is advised to select: Driver outputs: Steer Torque – F2. This is a known limitation and will be resolved in a future release.
Figure 8. Note: The Steer Angle and Torque output request available in the Front suspension system of the Library models reports zero torque when the Steer Control type is set to Torque. For plotting steer torque in this case, it is advised to select: Driver outputs: Steer Torque – F2. This is a known limitation and will be resolved in a future release.
Enhancements
- Parameterize Existing Points with Respect to a Marker
- A new tool is available in the HyperWorks interface to define existing points relative to a marker. Using this option, independent points can be parametrized with regard to a marker, so that changing the marker’s position or orientation would also move the points. Right-click the context menu on selected point to display the tool.
- Parametrizing a Point to a Node
- A new location function, getnodecoordinates, can be used to parametrically link a point’s location to a node in the model. The node can belong to a flexible body or a graphic of type File Graphic. This function causes repositioning of such a point when the flexible body or the graphic is moved. When a point is created at a node (using Alt+Click) through the Point creation tool, the point coordinates are set using the getnodecoordinates function.
- Automatic Parsing of Windows Path into a Unix-equivalent Path
- A new environment variable, DOS_DRIVE_$, assigns a Windows drive letter to Unix paths. This creates a Windows-style path, starting with the drive letter, on Unix/ Linux. MotionSolve, while parsing any path, replaces the drive letter and colon ($:) with the content of the respective environment variable. This facilitates using input files (XML, PY) with references to other files (for example, H3D) containing Windows drive letters in Unix.
- Update to ProximitySensor
- The ProximitySensor element measures the minimum distance between the graphics or a mesh of two bodies. The sensor tracks the state of interference of the graphics and/or mesh, the length of the minimum distance, and the coordinates of a pair of closest points. In this release, ProximitySensor has been extended to flexible bodies.
- Updates to PTCV and PTSF
- The point-to-curve and point-to-surface constraints have been extended to support perpendicular constraint.
- Active State Python
- MotionView and MotionSolve support Python as a scripting language. Active State Python has been upgraded to version 3.8.10.
- Vehicle Control FMU Blocks Showing Only Relevant Parameters
- The FMU control blocks used in the vehicle dynamic simulations (EPAS,
TC, ABS, ESP, and Electrical Powertrain) were enhanced to expose only
the meaningful design parameters of the control unit. This facilitates
the understanding and the design modeling of the controls in the
MotionView environment.
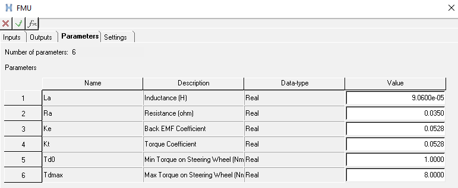 Figure 9.
Figure 9. - New tutorial explaining how to add the Altair Driver in a generic model
- A tutorial is available in the Altair Simulation online help that explains how to include the Altair Driver control unit in a generic model created with simple entities and not using the Assembly Wizard library. The tutorial also demonstrates how to include a Slalom Event and add external control signals to the model.
Resolved Issues
- Definition-based entities fail to create using the Python API when path separator ‘\\’ is used.
- Contact model takes longer to export than previous versions.
- Spring graphics appear skewed when one end point has all coordinates with uniform scaling.
- The 'Create points at interface nodes' macro in the flexbody Nodes dialog does not work correctly when executed a second time.
- Graphics System collector does not allow picking using the Advanced selection dialog.
- “Show Spring” option on the Spring entity is not correctly exported to MotionSolve PY.
- An application error is encountered in the Data Summary's Spring Damper tab.
- Move tool – Snapping to mesh nodes using Alt key does not work.
- Move tool – Fails in the first attempt to grab the geometrical objects for move.
- Display of Compliant Joint is not proper in Topology View.
- MotionView does not allow export of flexbody without interface nodes.
- Application error when attempting to ungroup a rigid group containing grounded bodies.
- Application error when changing the variable name in the Entity Editor.
- Inconsistent invariants between OptiStruct and MotionView XML writer can occur in the FlexH3D if there is a MODEL card in FEM that reduces the model information.
- Linear analysis: Fixed an issue with the C matrix when POUTPUT has a force expression that is referring to BEAM, BUSH, or FIELD.
- Velocity motion with initial displacement has issues during an analysis after a static step.
- The error calculation for the controller in the Altair Driver steering motion control was improved to provide a smoother output torque signal in the steering joint.
- Altair Driver does not abort simulations when the demand path/velocity are violated.
Known Issues
- Model Identification Tool 2022.1
- In HyperWorks v2022.1, the Fit Monitor that shows the progress of the fitting process is not displayed. Use View Jobs to check the fitting jobs’ status. This issue will be fixed in a future release.
Altair Multi Body Solutions 2022 Release Notes
Highlights
- MotionView performance improvement
- EDEM coupling enhancements
- 2-wheeler stability event
- Tire soft-soil
- CDTire inflation pressure
- Tire test-rig - combined slip
- N-Post report
- Applus IDIADA proving grounds
- XenomatiX® scanned roads
More details about these features, additional enhancements, and resolved issues are described below.
New Features
- MotionView Performance Improvement
- MotionView core has been upgraded for improved model read and edit
times. Large assembly-based and systems-based models load up to 10 times
faster compared to previous versions. Similarly, exporting solver decks
of these models is also up to four times faster. There is a smaller
improvement time in reading CAD-based models.
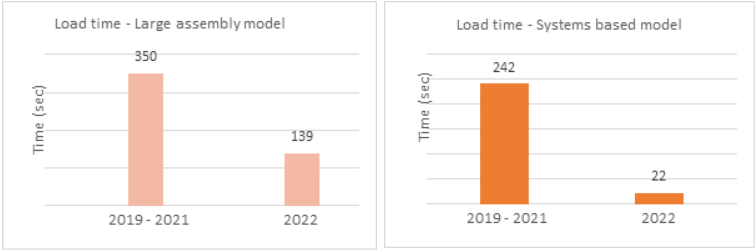
Figure 10. - EDEM Coupling Enhancements
- MotionView/MotionSolve can interface with Altair EDEM, a
state-of-the-art bulk material simulation tool. EDEM is based on the
Discrete Element Method (DEM) that simulates and analyzes the behavior
of bulk materials, such as sand, granules, capsules, grass, rock masses,
and so on. In this coupling, the mechanical part is modeled in
MotionView and the bulk material is defined in EDEM. Using MotionView,
you can transfer geometries directly to EDEM and initiate the
co-simulation between MotionSolve and the EDEM solver. New to this
release is the transfer of geometry labels from MotionView to EDEM.
Graphics in EDEM that are connected to bodies in MotionView/MotionSolve
no longer need to be named component_0000,
component_0001, and so on. This helps
significantly in associating EDEM graphics with MotionView/MotionSolve
bodies.Note: This feature works only with EDEM 2022 or newer.
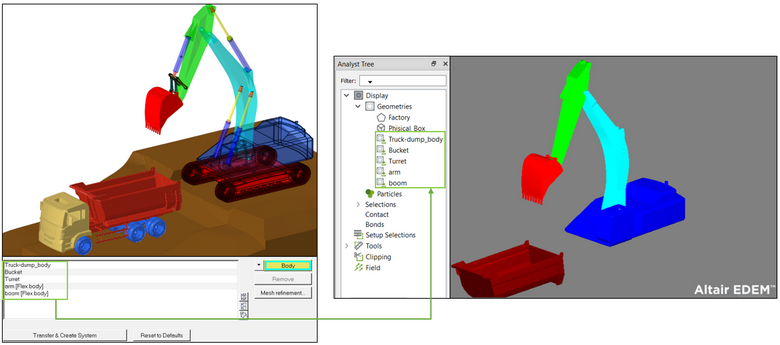
Figure 11.Furthermore, MotionSolve supports the Save/Load functionality for co-simulation with EDEM. You can save results in specified increments and restart at a saved point. The advantages are two-fold:- View intermediate results and adjust either the MotionSolve or EDEM model, if necessary.
- Co-simulations that were interrupted do not have to be restarted from the beginning, but can instead be restarted from a saved point in time.
- 2-Wheeler Stability Event
- A new event was added in MotionView to evaluate the stability of leaning
(especially 2-wheeled) vehicles. To help understand the weave and wobble
modes, the event can perform a Linear or Transient analysis, using a
pulse force or a general force defining the disturbance on the vehicle.
The vehicle can be simulated on different road surfaces. A report
session of the stability analysis includes:
- Linear analysis: Animation of the event and eigenvalues reported by MotionSolve for the model (.eig file).
- Transient analysis: Animation of the event, applied pulse or disturbance, steering wheel angle, FFT magnitude of the steer angle, roll angle, FFT magnitude of the roll angle, yaw angle, and FFT magnitude of the yaw angle.
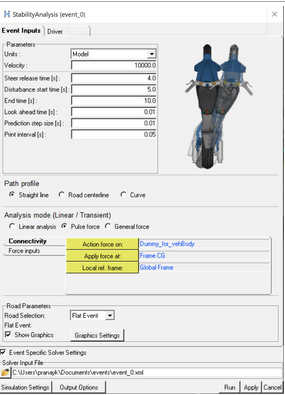
Figure 12. Stability Event for 2-wheelers - Tire Soft-Soil
- MotionView/MotionSolve offers a new empirical tire model for soft soil
interaction. It offers a computationally efficient way to study the
dynamic behavior of vehicles traversing a compressible surface. The soil
is characterized by the well-known equations proposed by Bekker and
Wong. An additional graphic was implemented that visualizes the tire
sinkage into the soft ground. You are encouraged to use this tire model
first for initial design study before engaging in a more complex and
computationally expensive MotionSolve, EDEM, and PME FlexTire co-simulation.
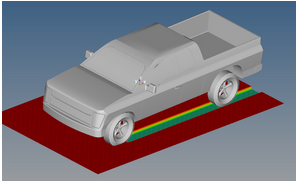
Figure 13. Tire Soft Soil Post-processing in HyperView - CDTire Inflation Pressure
- A new field was added in the AutoTire panel to include the inflation pressure for CDTire models. With inflation pressure, you can simulate the effects of a tire blowout or flattening during a vehicle simulation.
- Tire Test-Rig - Combined Slip
- In MotionView, the Tire Test-Rig option simulates the combined slip
test. This test help evaluate the limits of the tire model in events
where it is subjected to multi-directional forces. A report session of
the combined slip test includes the model animation, tire force plots,
slip values, and cross and normalized plots.
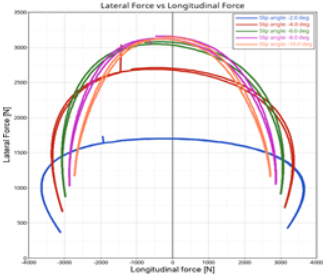
Figure 14. Cross Plot: Lateral Force vs. Longitudinal Force - N-post Report
- A results report is available to simplify the post-processing of the
n-post test rig, assisting the analysis of vehicle vibrations or loads
evaluation. The report opens a list of pages and windows in a HyperWorks
session, displaying the animation of the event, vehicle body
accelerations, steering wheel accelerations, wheel forces, actuator
displacements, and actuator forces.Attention: Known issue - Overlaying of an n-Post report is not supported in this release.
- Applus IDIADA Proving Grounds
- Applus+ offers services and solutions in the testing, inspection, and
certification sector. At the IDIADA headquarters in Spain, there is a
370-hectares proving ground with various test tracks. The virtual
representations of these test tracks are available to be used as road
models in MotionView/MotionSolve simulations. The road files are
extracted from high resolution scans to capture all macroscopic
unevenness and irregularities of the real surfaces. The road files are
available through the Altair
Partner Alliance. You can accelerate their vehicle design and
development activities by integrating IDIADA Spain Virtual Proving
Ground (ISVPG) directly into your MotionView/MotionSolve model.
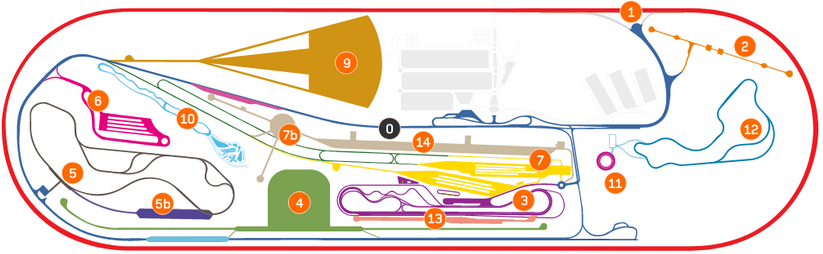
Figure 15. Applus IDIADA Spain Virtual Proving Ground - XenomatiX® Scanned Roads
- XenomatiX® measures and collects data of any road network or part of it, including local roads, highways, harbor quays, airport runways, or even off-roads. The data is measured using the solid-state lidar sensor XenoTrack and analyzed in XenoWare road software. A sample set of scanned road data from XenomatiX® are now available to be used as road models in MotionView/MotionSolve simulations. The road files are available through the Altair Partner Alliance.
- MotionSolve Online Community
- Altair hosts an online community of experts to share insights and collaborate with the wider CAE community. Part of this community includes forums and user groups where you can obtain answers to questions with support from other users. Click here to access the MBS Solutions community. MotionView/MotionSolve users are encouraged to participate in this forum to engage in online discussions, obtain insightful use cases, and access valuable resources to discover, learn, and grow as a MotionView/MotionSolve user.
- HyperWorks Startup Dialog
- In the Windows Start menu, individual client shortcuts are replaced by a single HyperWorks shortcut that prompts you to pick the client, profile, directory, or recent models and sessions.
Enhancements
- In MotionView, you can export a flex body to the solver deck without any connections.
- The flexible body preparation tool (Flexprep) reads OptiStruct FREE format statements in the FEM input file.
- The Preload tab in the SpringDamper panel is deactivated when stiffness or damping have non-linear properties.
- MotionView provides clearer error message upon failure of geometry transfer to EDEM. A warning message is displayed during the transfer of geometry to EDEM if the EDEM DLL path has a mismatched version.
- Export to CM Labs Vortex supports transferring rigid groups.
- New options to control Preload for SpringDampers are available.
- Using component names and units (cnames and cunits) are supported for user-defined outputs.
- MotionSolve added an optional attribute to the point-to-deformable-curve constraint (PTCV) that enforces the z-axis of the point marker to be either normal or tangential to the curve.
- MotionSolve relies on the industry-wide accepted Intel® Math Kernel Library (MKL) for its math routines. These routines are highly optimized and threaded for maximum performance. With this release, MotionSolve upgraded the version of the MKL from 2019.5 to 2020.
- MotionSolve’s Python-based API MSolve supports MQTT, a publish-subscribe network protocol that transports messages between devices.
- Tire deformation for CDTire and F-Tire can be visualized in HyperView.
- Aerodynamics force is added to the truck libraries.
- Fiala tires have the option to enter the tire friction (Mu) curve as a function of slip or force.
- MotionSolve supports F-Tire version 2021.4.
- MotionSolve supports OpenCRG version 1.2.
Resolved Issues
- mdl_batch fails launching HyperMesh when executed from a non-writeable location.
- Cell heights for tables in datasets were inadequate.
- Isolating entities on vehicle models breaks Autotire and AltairDriver.
- Application error is observed with degree of freedom check when Motion entity is unresolved.
- H3D file reference in exported MotionSolve solver deck (Python-based API) has changed to the absolute path.
- Application error while creating multiple systems using the Belt-Pulley system creation tool.
- An error is encountered during data MDL import relating to the number of records in Table Form.
- Export to Vortex Studio created an untitled folder under the user’s home directory.
- Flexbody ID assignment process on clicking run breaks shared definition.
- Application error when transferring model containing grounded bodies to Vortex.
- Initial conditions tab in Systems panel does not list bodies whose ICs are overridden by individual body IC assignment.
- Erroneous inertia properties are reported for certain surface-only graphics.
- Importing a system definition into a system with the same definition name results in an application error.
- An application error is encountered in the tab.
- In certain instances, a root-finding issue for CVCV constraint can occur.
- In some cases, using AltairDriver results in incorrectly stacked licenses.