Airbag Deployment Debugging
The objective here is to provide some guidelines on how to troubleshoot a simulation where the airbag does not deploy properly or crashes because of the airbag.
There are many possible reasons for the deployment to fail or the simulation to crash because of the airbag. Here, the most common issues are the focus.
Unit System
Check the density and modulus of the different parts and verify that they are in the same unit system. For example, Young's modulus, for plastics and metallic parts should be in range of:
0.01 GPa < E < 210 Gpa
These values can be checked in HyperCrash from the contour check located in the Quality pull-down menu.
Incorrect Contact Definition
- Airbag self-contact for surface and edge contact.
- TYPE19
- Alternative for some models that require different settings for surface and edge contact define TYPE7 + TYPE11
- Refer to Airbag Setup Recommendation for contact
- Airbag to environment (IP, Steering wheel…)
- TYPE7: airbag is secondary, environment is main
- TYPE7 symmetric contact: environment is secondary, airbag is main
- TYPE11: airbag is secondary, environment is main
- Alternative is to define a single TYPE19 with airbag as secondary and environment as main
- Setting Idel=1 (critical) when failure is defined
Intersections will prevent correct deployment of the bag and should be removed. There should be no intersection on the self-impact contact of the bag or between the bag and the environment. Intersection can be checked in HyperMesh or HyperCrash.
Penetrations are common in the self-contact of a folded airbag. The ideal case would be to have no penetration at all. The flag Inacti=6 adjusts automatically reduces the gap to prevent initial contact force caused by penetrations. However, after the automatic reduction, there still needs to be an adequate gap. Therefore, the maximum penetration should be less than 95% of the contact gap. A penetration check can be done in the HyperCrash or HyperMesh penetration checking tool.
Sensor and Reference Geometry
The sensor defining the injection start time for the airbag (TTF), /MONVOL sens_ID should also be referenced in the material LAW19 or LAW58 sens_ID. This sensor allows the solver to know when the reference geometry should become active.
If the same sens_ID is not used, then unrealistic deformation of the airbag, after the first few milliseconds of the deployment and erratic behavior, can occur.
Incorrect Material
Check the recommended values in Airbag Materials.
Incorrect Property
- /PROP/TYPE9 (for LAW19)
Ish3n=2; Ismstr=1; N=1
- /PROP/TYPE16 (for LAW58)
Ish3n=2; Ismstr=4; N=1
Incorrect Reference Geometry
If the simulation fails after the first few cycles and the initial internal energy is very high, it could be due to an incorrect or corrupted reference geometry. The reference geometry can be displayed in HyperCrash. Check that all elements of the airbag are included, and they do not look distorted.

Figure 1.
Incorrect Boundary Condition / Initial Velocity
Check if there is a boundary condition applied on the canister of the airbag. In a sled/full vehicle simulation, this may prevent the airbag from moving with the vehicle. Those boundary conditions may come from another airbag model simulation.
When running a sled case with an initial velocity, remember to check that the airbag is included. A good practice in this case is to isolate the vehicle and verify that all the nodes have an initial velocity > 0 at t=0.
Internal Nodes in Parts with VOID Materials
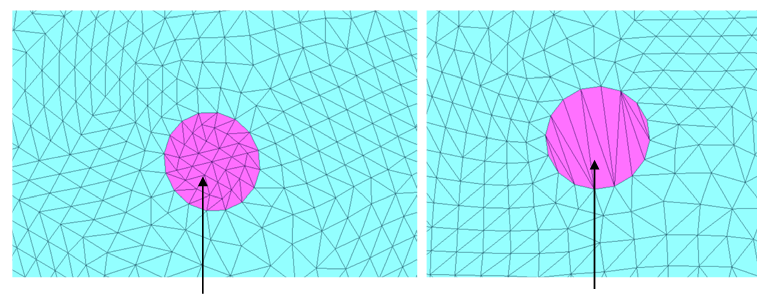
Figure 2. Left: Void Material with no Internal nodes; Right: Incorrect Void material has internal nodes
Incorrect Normal Orientation
ERROR ID : 8
** ERROR IN MONITORED VOLUME DEFINITION
DESCRIPTION :
--MONITORED VOLUME ID : 6620000
--MONITORED VOLUME TITLE : PAB
OPEN VOLUME OR WRONG ELEMENT ORIENTATION
SOLUTION :
VOLUME MUST BE CLOSED AND NORMALS OUTWARD-ORIENTEDInstead of changing the normal of the elements, a better solution is to ask the solver to reverse the normal when generating the surface of a particular component.
/SURF/PART/19
Airbag
-1 2 3 5 8 9Airbag Time Step, /DT/FVMBAG/1
In the Engine file, time step treatment /DT/FVMBAG/1 should be present.
/DT/FVMBAG/1
0.9 0.0002
/FVMBAG/MODIF
#monvol_ID
2000
# igmerg cgmerg cnmerge ilvout
1 0.01000 0.001000 1Static Deployment Test
Before applying the airbag model in your vehicle model, it is recommended to first run a static deployment test.
- The time step Engine file parameters (/DT/NODA/CST; /DT/INTER/DEL, …) that you will be using in the full vehicle/sled simulation
- The version of the solver that you will be using in the full vehicle/sled simulation
Verify that the airbag deploys properly. Check mass added, volume, pressure, gas mass and gas mass out to verify that the airbag deploys as expected. If the airbag does not deploy as expected here, there is little chance it could deploy well in full vehicle.