A cylindrical joint is like a rigid body, except that one specific direction is
defined with the first two secondary nodes. All nodes are free to move along this direction
and to rotate around it.
A kinetic condition is applied on all secondary nodes, including the first two defining the
privileged direction No main node is used. Figure 1. Cylindrical Joint
If all the secondary nodes are initially aligned, they will always remain aligned. As visualized
in Figure 1, the rotation freedom is a local rotation for each node and not a
global rotation around axis 1-2. Therefore, it is recommended to use a cylindrical joint
with aligned nodes. Figure 2. Door Hinge Example
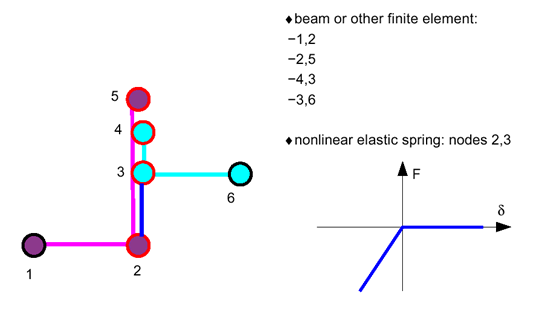
Figure 2 shows how a hinge
could be modeled using a cylindrical joint. The cylindrical joint is made of nodes 2, 5,
3 and 4. Note that in hinge modeling nodes must be aligned to get a realistic rotation,
then beams or any other finite elements are used to connect nodes 1-2, 2-5, 4-3 and
nodes 3-6. Finally, it is possible to link nodes 2-3 with a nonlinear elastic spring to
improve the connection. Figure 3. Hinge Modelization