RD-E: 5000 INIVOL and Fluid Structure Interaction (Drop Container)
The aim of this example is to introduce /INIVOL for initial volume
fractions of different materials in multi-material ALE elements,
/SURF/PLANE for infinite plane, and fluid structure interaction (FSI)
with a Lagrange container.
The model files used in this example are available in:
/radioss/example/50_inivol_and_fluid_structure
Model Description
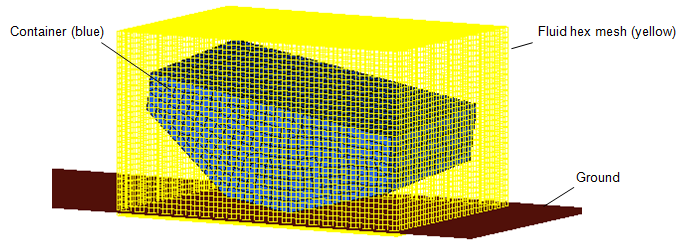
A hex mesh is created that fully encloses the structural container. The mesh size of
the hex mesh should be ½ the size of the structural mesh. Ideally the hex mesh should also
be ¼ of the structural mesh size in the direction of impact. To simplify this example, the
hex mesh in this model does not adhere to the ¼ mesh size guideline.
A container partially filled with water is simulated being dropped from a height of 1 meter. The
container is partially filled with water with the remainder filled with air. Figure 1. Problem Description
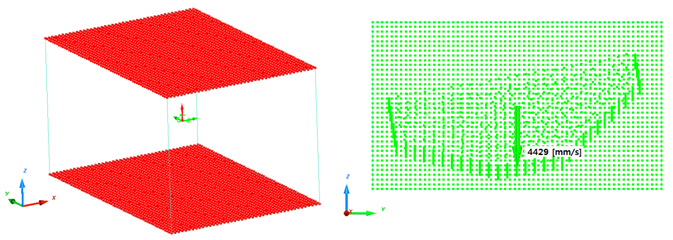
Boundary Conditions
Each outer side of the hex mesh is constrained to prevent displacement in the
direction normal to the side. For example, the top and bottom of the hex mesh is
constrained in the z translation DOF (Figure 2). The same is done for the other four sides. The velocity at
impact of a drop from 1 meter would be 4429 mm/s. Since the simulation is started
right before impact, an initial velocity of 4429 mm/s is applied to the container
and the fluid hex mesh (Figure 2). Figure 2. Boundary Condition of Container in z-direction
Units: mm, s, Mg, N, MPa
In one /MAT/LAW51 card, three different phases can be defined. The
two phases are: Air and Water
Air is defined with the following characteristics:
Reference density used in E.O.S (equation of state)
1.2e-12
Initial density of air
1.2e-12
Initial energy per unit volume
0.25
Hydrodynamic cavitation pressure
-1e-20
Hydrodynamic coefficient C41
0.4
Hydrodynamic coefficient C51
0.4
Water is defined with the following characteristics:
Initial density of water
1e-9
Hydrodynamic cavitation pressure
-1e-20
Hydrodynamic coefficient C03
0.10
Hydrodynamic coefficient C13
2250 (Liquid bulk modulus)
/ALE/MAT should also be defined for the
/LAW/MAT51 material, to indicate that is an ALE
model.
Coupled Euler_Lagrange (CEL) Interface
To define the contact between the fluid and the structure a visco-elastic penalty
formulation /INTER/TYPE18 interface is defined as:
Main is the Lagrange structure
Secondary is the ALE fluid nodes
Gap is the Interface gap. The recommended value is 1.5 times fluid element size along
the normal direction to contact.(1)
Where,
The (highest) fluid density
Velocity.
For incompressible models (ditching, sloshing, etc.), use the
velocity of the event.
For compressible but not supersonic, use the speed of the sound
in the material.
Compressible and transonic (Mach 0.8 to 1.0), replace the term with
Where,
Speed of the sound in the material
speed of sound in air
Compressible and supersonic, use the velocity of the event
For an explosion, use the Chapman Jouguet velocity
Surface area of the Lagrangian elements
Interface gap, as defined above
For this example:(2)(3)
Simulation Iterations and Modeling
Fill Container with /INIVOL.
With
/INIVOL, the water line can be defined in this
part.
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
/INIVOL/part_ID/inivol_ID
inivol_title
surf_ID
ALE_PHASE
FILL_OPT
ICUMU
FILL_RATIO
surf_ID
ALE_PHASE
FILL_OPT
ICUMU
FILL_RATIO
etc
etc
etc
etc
etc
surf_IDn
ALE_PHASE
FILL_OPT
ICUMU
FILL_RATIO
/INIVOL uses successive filling actions of the initial background
multi-material ALE mesh, to get the final configuration of the initial volume
fractions (three containers and three ALE phases). Initially the volume is filled by
the first material defined in the /MAT/LAW51 field. In this case,
the first material is air, so the entire hex mesh is first filled with air. Next, a
surface is defined from the container part
ID.
/SURF/PART/998
Vessel_Surf_Part
85
Since the surface normal of container part point outside, use
FILL_OPT = 1 to fill the water (phase 3) inside the container
(filling the side which against surface normal
direction).
Now, ALE mesh is filled with ALE material 1 (air) from /MAT/LAW51
on the outside of the container and material 3 (water) inside the container. Lastly,
define a surface plane, /SURF/PLANE to define the fill height.
The normal of this plane points upward, use FILL_OPT = 0 to fill
the air (phase 2) above the plane (filling the side along normal
direction).
To check the initial fill, the following animation options can be used in the Engine file.
/ANIM/ELEM/DENSITY
/ANIM/ELEM/VFRAC
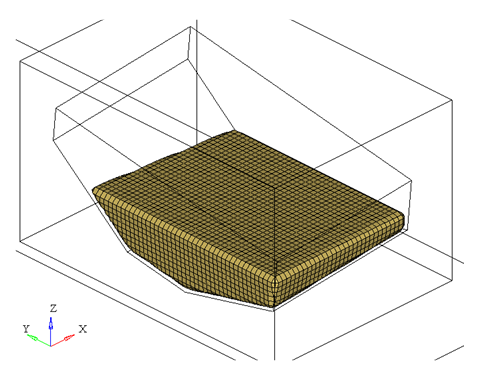
You can contour the model and use section cut to see inside, or use iso-surface, as
shown in Figure 4.
Figure 4.
/ALE/MUSCL - Anti-diffusive Technique
/ALE/MUSCL allowing for a better localization
of the interface between fluids, and much less numerical diffusion. In this example,
use default for Beta.
/ALE/GRID/DONEA - ALE Grid Velocity
This activates the J. Donea Grid Formulation, where the velocity of a given grid node
depends on velocity and displacements of neighboring grid nodes.
Engine Control
It is recommended to use time step scale factor 0.5 for ALE in
/DT/BRICK in order to keep computation stable, and use
fac=1.0 in /UPWM/SUPG. This option
provides better velocity field in Cartesian grids when ALE material velocity is not
normal to brick faces.
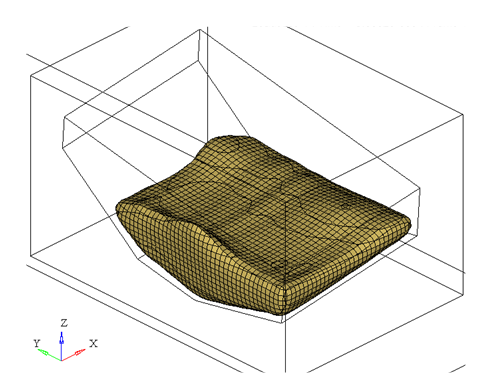
Results
To see the movement of the water in the container, and iso-surface plot of results
type "density” can be done. If the simple averaging method is used in HyperView, the results will look smoother.
Also notice that water is starting to splash up the sides of the container at the end
of the simulation. Figure 5.