This section describes how you attach a bushing to a model.
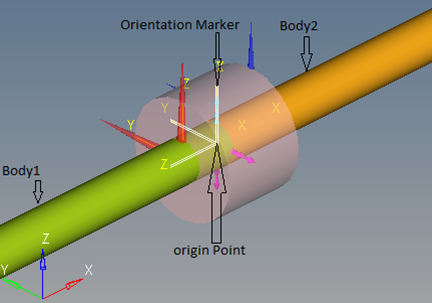
Use the Collector buttons on the panel to select the two bodies the bushing connects,
the marker that orients the bushing, and the point that locates the bushing. Figure 1.
From the Model Browser in MotionView, select the entity
AutoBushFD.
A panel opens with the bushing information displayed. It includes a
Connectivity pane and a Properties pane.
Click Body 1 and Body 2 to select
a body from the modeling window, or double-click to
select a body from the browser dialog.
Click Marker to select a marker from the modeling window, or double-click to select a marker from the
browser dialog. Markers for the X, Y, and Z axes define the bushing’s X, Y, and
Z axes.
Click Point 1 to select a point from the modeling window or double-click to select a point from the
browser dialog. The point’s location defines the bushing’s location.