This type of property card is used to
specify the geometric properties of the CABLE
element. Each cable property element must have a unique
identification number.
This property card defines the
geometrical properties of the cable. The material properties of
the beam are defined by the material specified by
mid.
A cable is usually made up of multiple
wires wound together. For a given cable diameter (D), the bending
resistance depends mainly on the number of wires (nf) and the
wire diameter (d). Typically, the overall cable diameter (D) is
more readily available than the individual wire diameters
(d1, d2, ..dn). This is
illustrated in the figure below:
Figure 1. A cross section of a cable consisting of
multiple wires or fibers
The overall bending stiffness of such a cable decreases as
the number of wires or fibers increases. Moreover, this is
a non-linear relation. MotionSolve captures this effect
by calculating the moment of inertia as:
where
is the calculated element moment of inertia
about the y axis
is the number of fibers or wires
is the overall cable diameter
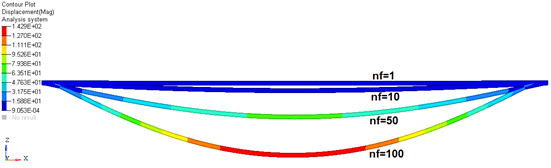
The effect of increasing the number of fibers
in the cable element is shown next. A cable component of
length 1m is constrained at both ends by a roller support
and is allowed to sag due to its own weight. The profile
of the cable at steady state is shown for varying value of
nf.
Figure 2. The effect of nf on cable element bending
stiffness
As can be seen, increasing the number of fibers
reduces the bending stiffness of the cable
component.
graph is a
post-processing flag that determines how this element will be
represented in the animation H3D file.
graph = "0"
implies that this element will not be represented
in the H3D
graph = "1"
implies that this element will be represented as a
line drawn between the two connecting nodes.
Figure 3. The representation of a cable with graph =
1.
Note: When using
graph="0" or
graph="1", you
will not be able to visualize the stress, strain or
displacement contours. To do this, use
graph="2" or
graph="3".
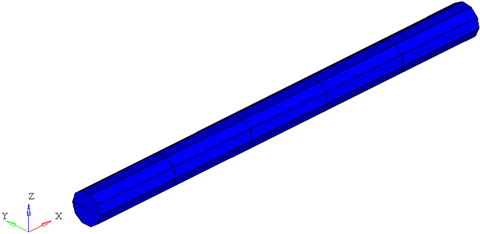
graph = "2"
implies that the cable will be represented by 3D
solid elements. This mode is useful when trying to
visualize the stress/strain and displacement
contours.
Figure 4. The representation of a cable with graph =
2. The cable is represented by 3D elements
graph = "3"
implies that the cable is represented both as 3D
solid elements as well as a line connecting the two
nodes of the cable. This is useful when you need to
visualize both the center line and the 3D
representation of the cable.
Figure 5. The representation of a cable with graph =
3. The 3d elements in the middle of the cable are
turned off to show the center line of the
cable
When representing the cable as a solid, the arguments ngx,
ngr and ngt determine the number of elements that are used to
represent the cable in the animation H3D.
Figure 6. Effect of ngx, ngr and ngt on the 3D
representation of a simple cable
ngx = ngr = 1; ngt = 1
ngx = ngy = 2; ngt = 12
While increasing the ngx,
ngy and ngz results in a better representation of the
cable, it also increases the post-processing time taken by
MotionSolve to write
out the H3D. In addition, large values of ngx, ngy and ngz
will increase the file size of the H3D considerably.
Consider using the minimum values of these attributes that
satisfy your visualization needs.