/SENSOR/INTER
Block Format Keyword Describes the sensors used to activate or deactivate an object according to interface force.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SENSOR/INTER/sens_ID/unit_ID | |||||||||
| sens_title | |||||||||
| Tdelay | |||||||||
| int_ID | DIR | Fmin | Fmax | Tmin | Fcut | ||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| sens_ID | Sensor
identifier. (Integer, maximum 10 digits) |
|
| unit_ID | Optional unit
identifier. (Integer, maximum 10 digits) |
|
| sens_title | Sensor
title. (Character, maximum 100 characters) |
|
| Tdelay | Time
delay. (Real) |
|
| int_ID | Interface or
sub-interface identification number. (Integer) |
|
| DIR | Force direction.
(Integer) |
|
| Fmin | Minimum force. 3 Default = 0 (Real, maximum 20 fields) |
|
| Fmax | Maximum force. 3 Default = 0 (Real, maximum 20 fields) |
|
| Tmin | Minimum time duration
before activation when criteria is reached.
(Real) |
|
| Fcut | Cutoff frequency.
(Real) |
Comments
- Sensors can be used to activate airbags, imposed forces, pressures, and fixed velocities.
- Sensors can be used to activate or deactivate these elements: brick, quad, shell, truss, beam, spring or 3N Shell with /ACTIV.
- For Sensor type
INTER:A Sensor is activated when contact on interface is detected, and following force criteria is satisfied:
- or during Tmin
Dir defines Force direction:- FN
- Normal Force
- TF
- Tangent Force
Sensor is deactivated if the contact is lost
If there is no impact during a time equal to Tdelay (Line 3), the sensor is deactivated.
A sensor is used for one interface or sub-interface. You can use several type INTER sensors.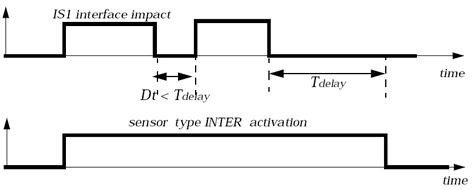
Figure 1. - To obtain a class 1000 SAE filtering, the recommended value for Fcut is 1650 Hz (1.65 ms-1). Application of the filter helps to prevent wrong activation of the force-based sensor, due to a local force peak. Another method to avoid this is to use a small value for Tmin.