Altair MotionView 2022.3 Release Notes
Altair Multi Body Solutions 2022.3 Release Notes
Highlights
The Altair Multi Body Solutions 2022.3 release includes the following enhancements
and bug fixes to MotionView and MotionSolve:
- Entity Editor.
- Entity Browser.
- Run with live animation updates.
- Vehicle Dynamics solutions as an extension with a dedicated page, workflow, and tools.
- New library of components replacing the Auto Entities.
- Deformable roads for soft-soil terrains.
- Siemens MF-Tyre/MF-Swift version up to 2212.
- Cosin Ftire version up to 2022-4.
- AcuSolve co-simulation update.
- Support for Jupyter Notebook.
- Deprecation of the Abaqus solver mode.
New Features
- Entity Editors and Panel Removal
- For the previous release, Entity Editors were introduced in the
HyperWorks MotionView interface. In this release, the editor has been
expanded to include the following entities:
- Control State Equations
- Field
- NLFE Body
- Entity Browser
- In this release, MotionView introduces the Entity
Browser user interface element. This is a dockable
browser that you can access from the View menu. The Entity Browser
contains MotionView entities. In a future release, MotionView will
support user-defined customized entities which will be stored, listed,
and accessible from the Entity Browser. Use the Entity Browser to:
- Search for an entity.
- Double-click on an entity to add it to the model.
- Add customized entities using an extension and the Extension Manager.
- Vehicle Solutions Extension with Dedicated Page, Workflow, and Tools
- Vehicle solutions in MotionView is a collection of tools and model libraries that enables the creation of motorcycle, car, truck, and bus models. It consists of dedicated libraries of suspension models that can be used to assemble full vehicle models, as well as a component library that simplifies using vehicle components, such as tires, shock absorbers, bushings, air springs, and other specific tools, to provide an easy and automatic way to create leaf springs, track models, road graphics, and vehicle events.
-
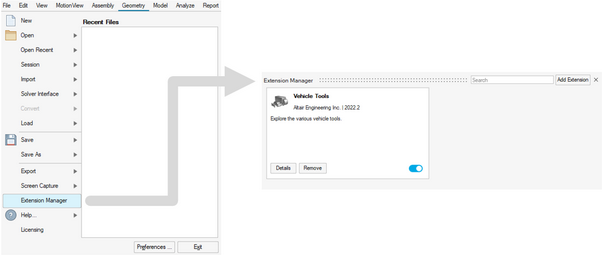
Figure 1. Vehicle Tools Extension -
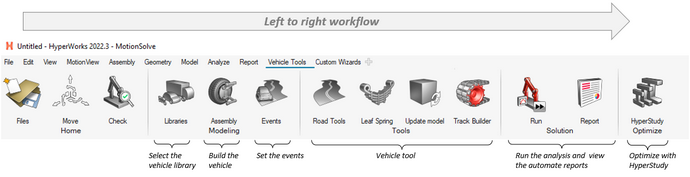
Figure 2. Vehicle Tools Page in MotionView -
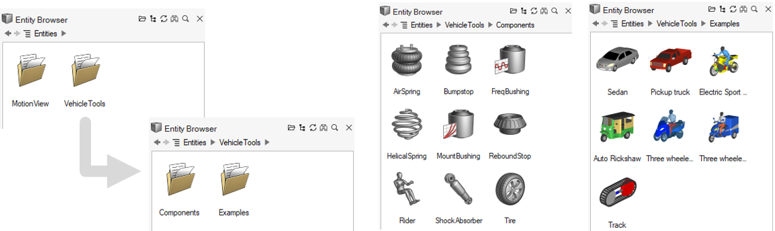
Figure 3. Vehicle Tools Folder in the Entity Browser - New Component Library for Auto Entities
- MotionView has a new component library to provide a better user experience in the HyperWorks interface. These components follow the guide bar workflow to connect the collectors and the Entity Editor to edit/modify the parameters.
-
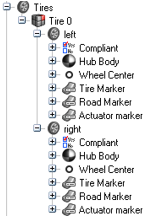
Figure 4. - Deformable Roads for Soft-soil Terrains
- In MotionView, you can include soft-soil road deformation in simulations using the soft-soil tire model. The deformable road graphic is created in MotionView using the Road Tools and sent to MotionSolve to simulate the tire-soft-soil dynamics. Use HyperView to visualize and post-process the soft-soil road deformation, including the Plastic Sinkage contour.
-
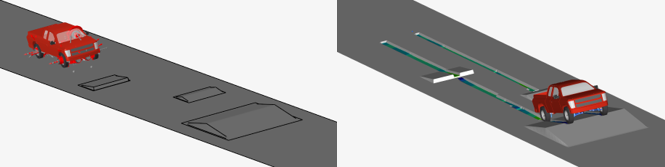
Figure 5. Deformable Road in MotionView (left) and HyperView (right) - AcuSolve Co-simulation Support
- MotionSolve can co-simulate with AcuSolve, Altair’s CFD solver, to incorporate fluid interaction with moving parts in a multi-body simulation. This is enabled in MotionView by using a system from the HyperWorks installation that adds the necessary MotionSolve statements to the model. In this release, native GUI support for fluid interaction with AcuSolve is available. The rigid body entity includes an option to enable interaction with AcuSolve. The remaining necessary solver statements are added automatically to the solver deck upon export. The run with live animation also supports co-simulation with AcuSolve.
- Run MotionSolve through Jupyter Notebook
- MotionSolve has a Python interface called msolve. This means that MotionSolve is available in Python as a library. You can access its functionality through a well-defined set of Python classes, methods, and tools (see the MSolve API Statements in the MotionSolve Reference Guide). In Python, you can access MotionSolve functionality in much the same way you access other libraries, such as numpy or scipy. With this release, msolve is embedded into a Jupyter Notebook. Start Jupyter through the MotionSolve_Jupyter Start menu (Windows) or through the <install_dir>/hwsolvers/script/motionsolve_jupyter.bat/sh script.
-
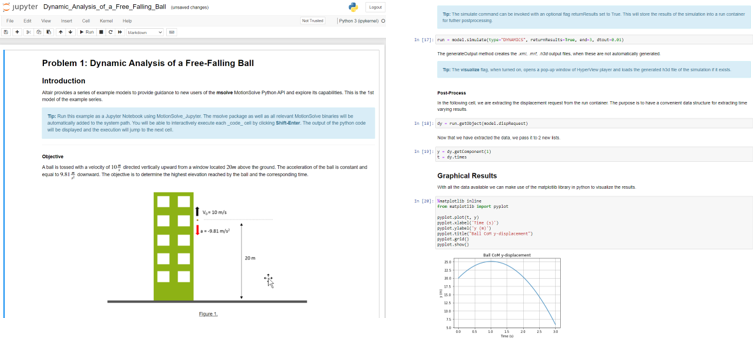
Figure 6.
Enhancements
- Updates to “Run with Live animation”
- The HyperWorks MotionView interface can animate the model on-the-fly
during simulation. This functionality has been further enhanced in this
release.
- Live animation works with MotionSolve co-simulation with EDEM and AcuSolve.
- Cname/Cunit is now supported.
- Resolved issues:
- Animation does not work when using single step forward/backward.
- Incorrect time in simulation failure message.
- Run failure with model containing outline graphics on Advanced Joint > Curve-Curve.
- Siemens MF-Tyre/MF-Swift Version 2212
- MF-Tyre/MF-Swift from Siemens, distributed with HyperWorks, is updated to Simcenter Tire version 2212 from version 2020.1.1.
- Cosin FTire Version 2022-4
- MotionSolve now supports the updated version of Cosin F-Tire 2022-4 used in the vehicle simulations.
- Option to Write Pre-2020 Style Label for Outputs in Solver Deck
- In version 2020, MotionView changed the way output labels are written to the solver deck so that the labels follow a consistent pattern for all output types. The change also influences the Request labels in plotting or any other post-processing tools that depend on the label patterns in the result files. A Preferences dialog option is now available ( in MotionView) to set the label to the pre-2020 style pattern.
- Default Settings
- The following default settings have been changed:
- Altair Compose/Activate OML under is On.
- Use in linearization option is On upon creation of a Solver Array of type Plant Input/Plant Output.
- Get properties from associated graphics option is On upon creation of a Body.
- Default value of maximum iteration under Static simulation settings has been changed to 750.
- Contact Pressure Contour Plot
- MotionSolve already calculates forces between bodies in contact. For this release, this feature has been expanded to include pressure distribution between contacting surfaces. In HyperView, the pressure distribution can be visualized using contour plots that are overlayed on top of the body's graphics. A contour plot is a graphical representation of a three-dimensional surface projected on a two-dimensional surface by plotting slices of constant values, called contours. For now, pressure distribution is supported for rigid bodies only. This feature may be expanded to flexible bodies in a future release.
Minor Enhancements
- Option to flip contact normals for a flexbody in contact is now available.
- All numerical values of XML files created during the SAVE command have been increased to 25 characters. This change ensures that the state and condition of the multi-body system after RELOAD is as close as possible to the ones before the SAVE. Hence, numerical errors and discontinuities in the time history are minimized.
- The version of the Parasolid packaged in MotionView and MotionSolve has been upgraded to 35.0.170.
- In the MotionSolve log file, error messages due to license checkout failures are more descriptive to support users in troubleshooting licensing issues.
- Support of xg, zg, xv, and zv attributes for the flexbody local coordinate system.
- A new analysis type called Verify instructs MotionSolve to verify the validity of an MBD model and provide model characteristics.
- Support for OML in MotionSolve custom functions.
- Support for deformable curve in linear analysis.
Known Issues
- In the new Tire component model, the variable PIN mode parameter, used to include a time variant expression to define the pressure value in a CDTire model, is currently not working.
- The soft-soil graphic system used to represent the soft-soil carpet road is not included in the new Tire component model. To represent the soft-soil road, use the new soft-soil deformable road or add the previous Auto Tire entity to include the carpet road.
- The visualization of the deformable road, tire force graphics, and air spring deformation is currently not possible using MotionView’s live animation. For such visualization, it is recommended to use the offline mode in the Run dialog and post-process the results in HyperView.
- Including a soft-soil deformable road in the model may impact the solver performance and result in a delay while writing result H3Ds based on the road dimensions and road increment. Only one road graphic H3D file should be active in MotionView while exporting the model to the solver.
- N-post analysis, Automated Report, and setting the road property file in the Events dialog are not supported with the new component; use the previous Auto Tire for such use cases.
Abaqus Solver Mode Deprecation
MotionView has been supporting export to the Abaqus solver deck for limited use cases. In version 2023, this solver mode is being deprecated. The Abaqus solver mode will not be available as a choice by default under . It can be turned on through the Preferences file.
Resolved Issues
- Application error when rapidly clicking Check Model twice.
- Icon for vector selection filter on the microdialog in the Marker's orientation context has changed for Dark Theme.
- Ground body Entity Editor shows contact prediction property.
- Flexbody pair sides in contact results in application error.
- Application error upon clicking unresolved Curve collector hyperlink in the panel.
- Flexbody graphic is not listed in the contact graphic dialog invoked from the Entity Editor.
- Application error when trying to merge bodies belonging to a rigid/ground group.
- Entity Editor is not displayed when you copy/cut/paste an entity.
- Plot and Animate buttons are not active immediately in the Run status dialog upon completion of a run.
- Vector created using CAD has incorrect origin.
- Vector cannot be picked using the Advanced selection dialog when invoked from the Orientation context.
- Expression Builder does not work for the Coefficient dialog in the ControlSISO Entity Editor.
- Reports are not readily available upon Live run.
- Microdialog hides when you enter a joint's context by double-clicking a joint.
- "Only interface nodes" status in Nodes/Modes dialog is not checked.
- Application error when adding a side of a flexbody pair in Contact.
- Application error when clicking on an unresolved hyperlink of a Curve collector in an Entity Editor.
- File menu closes unexpectedly when clicking the Solver interface.
- Belt pulley subsystem: In certain scenarios, belt wrapping at the end segment is incorrect.
- Craig Chang Contact method of CMS in FlexPrep works on Linux.
- Field entity > Stiffness and Damping matrices are transposed when exported to a solver deck.
- Show/Hide icon is not highlighted when in context.
- Entity Editor is not displayed after copy/cut/paste of an entity.
- Model containing multiple instances of the same flexbody, but with different interface nodes, fails to run in Live mode.
- CAD Import in HyperMesh failed when using the interactive mode in Linux.
- Application error due to space in the path when working with Activate co-simulation.
- Interface node cannot be picked for Points when there are coincident nodes.
- Space at the end of the Run name results in error during a Live run.
- Outline graphics on Polybeam results in an error during a Live run.
- Selecting NLFE Body in the Contact panel results in an application crash.
- System definition through *DefinitionInclude gets overwritten during the export of a system.
- Entity note in Output overwrites the title of the output in the solver deck.
- MotionView fails to find EDEM in Linux during geometry transfer.
- Component names are not filtered when PLT/NAM is read into a curve entity.
- MotionView crashes when invoking the Run settings when in the Orientation context.
- MSolve API for model.simulate(type=”Linear”) accidentally ignored user-defined attributes.
- Leaf Spring Builder not working on a web interface.
- Model with CDTire not working if saved and reloaded after static simulation.
- In some instances, an H3D generated by MotionSolve is not loading correctly in HyperView.
- During animation in HyperView, markers on flexible bodies are not moving correctly with the grid deflections.