Driver Overview
The Altair Driver is a set of MotionView models and libraries that allows MotionView users to control and script vehicle events.
Example events include:
- Constant Radius Cornering
- Single Lane Change
- Double Lane Change
- User Defined Path Following
- Fish Hook Event, etc.
This is achieved by creating an interface to the five vehicle inputs:
- Steering
- Throttle
- Gear
- Brake
- Clutch
Using Altair Driver you can simulate any number of full vehicle events using these
features:
- Scripting - break up the simulation into different maneuvers; select the controllers for vehicle inputs and define conditions that end each maneuver.
- Open-loop, closed-loop, and user-defined controllers to control.
- Longitudinal speed or acceleration.
- Vehicle path or lateral acceleration.
- Switching controllers during a simulation.
- Defining path and speed profiles parametrically, in a table, or by referencing a data file.
Architecturally, the Altair Driver is a cluster of signal manager, controller library, and controller manager.
| Controller | Logical unit of the driver computes outputs for given inputs. |
| Controller Library | Library of the available controllers. |
| Controller Manager | Parses through the Script, Altair Driver File (ADF). This manager does this
following:
|
| Signal Manager |
|
| End Condition Sensor | Monitors the end conditions and switches the maneuver when the end condition is true. |
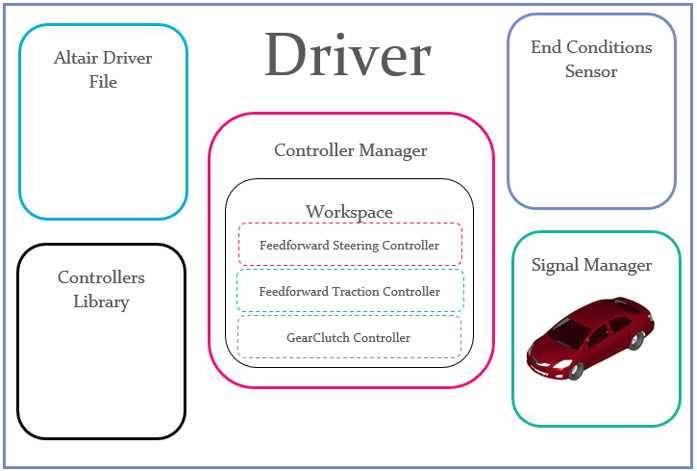
Figure 1.