Connect an FMU to the Model
-
Define the FMU Outputs. These are referenced by Force or Motion entities in the
Model.
The expression for the Forces/Motions in the Model use the ARYVAL function to reference the FMU outputs. The FMU outputs are available as attributes to the
y_arraydata member of the FMU entity. For instance,{fmu_1.y_array.output_3}, will contain the third output of the FMU.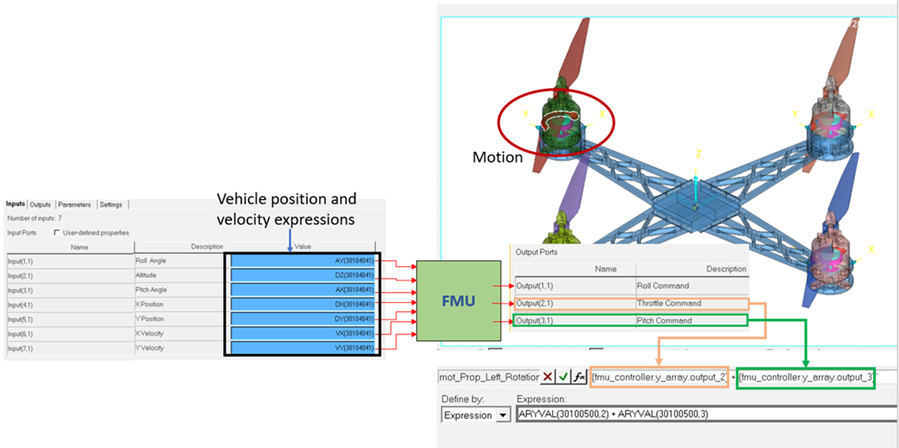
Figure 1. Force expression referring to an output of an FMUIn the above model of a quadcopter, the vehicle position and velocities captured by the solver expressions DX(), DY() etc. are provided as inputs to the FMU. The output from the FMU is tapped using the output attributes of the
y_arraydata member of the FMU that was resolved to the solver expression ARYVAL. In the demonstrated case, the motion on one of the blades uses the second and the third output. The expression{fmu_controller.y_array.output_2}returns the second output from the FMU’s (fmu_controller) output array (y_array).