/FAIL/SYAZWAN
Block Format Keyword This simplified failure criterion is based on a fracture surface with linear damage accumulation. It also provides the initialization of damage value using strain histories with linear strain path assumptions.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /FAIL/SYAZWAN/mat_ID/unit_ID | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | |||||
| C6 | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Dinit | Dsf | Dmax | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Inst | Iform | Nvalue | Softexp | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| fct_IDEl | El_ref | Fscale_El | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| fail_ID |
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| mat_ID | Material identifier. (Integer, maximum 10 digits) |
|
| unit_ID | (Optional) Unit
identifier. (Integer, maximum 10 digits) |
|
Card input format flag. 3
(Integer) |
||
| Minimum plastic strain at
failure. Default = 0.0 (Real) |
||
| C1 | First constant for failure
surface. (Real) |
|
| C2 | Second constant for failure
surface. (Real) |
|
| C3 | Third constant for failure
surface. (Real) |
|
| C4 | Fourth constant for failure
surface. (Real) |
|
| C5 | Fifth constant for failure
surface. (Real) |
|
| C6 | Sixth constant for failure
surface. (Real) |
|
| Plastic strain at failure for
uniaxial compression. (Real) |
||
| Plastic strain at failure for
shearing. (Real) |
||
| Plastic strain at failure for
uniaxial tension. (Real) |
||
| Plastic strain at failure for plane
strain. (Real) |
||
| Plastic strain at failure for
biaxial tension. (Real) |
||
| Dinit | Damage value initialization from
strain tensors flag.
(Integer) |
|
| Dsf | Damage initialization scale
factor. Default = 1.0 (Real) |
|
| Dmax | Damage initialization maximum
value. Default = 1.0 (Real) |
|
| Inst | Necking instability flag.
(Integer) |
|
| Iform | Necking instability formulation flag.
(Integer) |
|
| Nvalue | The N-value derived from Hollomon’s
Law. Default = 0.25 (Real) |
|
| Softexp | Stress softening
exponent. Default = 1.0 (Real) |
|
| fct_IDEl | Element size factor function
identifier. (Integer) |
|
| El_ref | Reference element size. Default = 1.0 (Real) |
|
| Fscale_El | Element size factor function scale
factor. Default = 1.0 |
|
| fail_ID | (Optional) Failure criteria
identifier. (Integer, maximum 10 digits) |
Example
/FAIL/SYAZWAN/1
# ICARD EPFMIN
2 0.0
# EPF_COMP EPF_SHEAR EPF_TENS EPF_PLSTRN EPF_BIAX
3.009 0.98 0.7 0.42 0.56
# DAM_INIT DAM_SF DAM_MAX
# INST IFORM N_VAL SOFTEXP
1 2 0.25 1.2
# FCT_EL EL_REF ELSCAL
/FAIL/SYAZWAN/1
# ICARD EPFMIN
1 0.0
# C1 C2 C3 C4 C5
0.65 -3.2234 -0.08 3.9031 0.2652
# C6
0.5266
# DAM_INIT DAM_SF DAM_MAX
# INST IFORM N_VAL SOFTEXP
1 1 0.27 1.2
# FCT_EL EL_REF ELSCALComments
- It is highly recommended to set the value of in /PROP/SHELL to 1. This will allow accurate calculation of the principal strain ratio .
- The value of C1, C2, C3, C4, C5, and C6 is based on:
(1) Where,- Plastic strain at failure.
- Stress triaxiality with
- Normalized Lode angle
Where, is the von Mises stress.
Figure 1 shows the example of curve fit of plane stress failure curve into failure surface criteria.
Figure 1. Example of Syazwan failure criterion fit - Two different parameter
input card formats are available for /FAIL/SYAZWAN
depending on the value of
.
- If = 1: you must directly input the Ci parameters
- If
= 2: you can
specify some plastic strain at failure for several commonly tested
loading conditions: uniaxial compression
, shearing
, uniaxial tension
, plane strain
and biaxial tension
. In that case, the
Ci parameter
will be automatically computed by solving the set of equations
below:
(2)
Note: The last equation imposes that the plane strain condition corresponds to a local minimum of the failure criterion. - In some cases, the criterion may have negative or very low values
for some loading conditions. In that case, it will be bounded by the minimum
plastic strain at failure parameter
that must be positive or null (by default =
0.0). All values under
are then ignored. Figure 2 shows an example with a minimum value (orange curve) of 0.2.
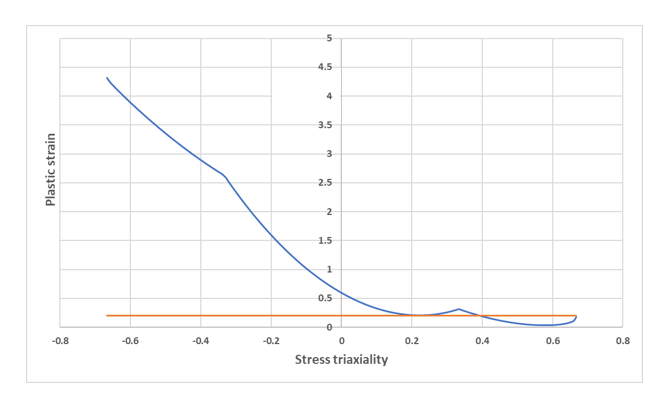
Figure 2. Failure criterion (blue curve) bounded by plastic strain at failure minimum value. (orange curve) of 0.2 - The damage variable evolution is computed incrementally
as:
(3) - You may want to realize a simulation starting from existing total
and plastic strains fields (after a previous forming simulation for
instance). In the case where the failure criterion is not computed during
the first simulation, it is possible to estimate a damage field from the
total strain tensor and the plastic strain values obtained at the end of the
first simulation (using .sta files). If the
Dinit flag is set to
1, the damage field will be computed if the plastic
strain ≠ 0. /INISHE/STRA_F,
/INISHE/STRA_F, /INISHE/EPSP_F and
/INISH3/EPSP_F must be present in the keywords of the
status file. The initial stress tensors are not incorporated into the
simulation model; thus, the stress triaxiality is derived
using:
(4) The value can be recovered from the stress triaxiality value using the first root of Equation 4:(5) Then, an initial damage value can be estimated as:(6) Figure 3 shows an example of initialized damage field in one-step after a forming simulation performed without failure criterion computation. Damage field is then deduced using the plastic strain and the strain tensor as presented above.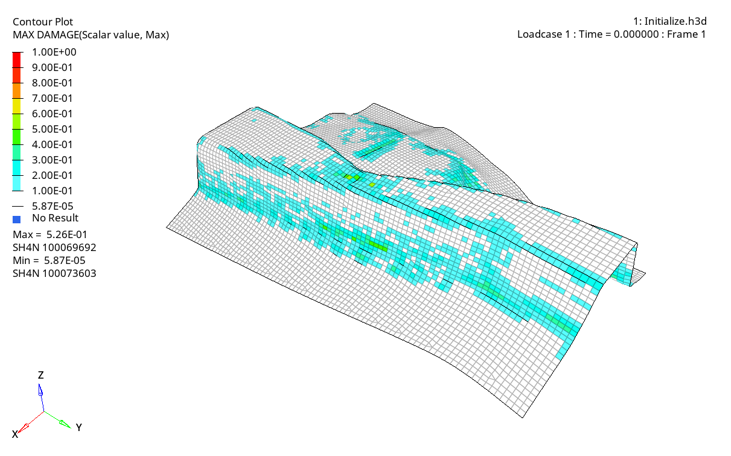
Figure 3. Example of damage field “one-step” initialization after a forming simulation - A controlled necking instability can be used if the flag
Inst is set to 1. To trigger this
instability, a criterion variable denoted
is computed based on the
Nvalue specified by
you, using:
(7) Where, ratio between the minor principal and major principal stress computed from using:(8) You can then compute an effective plastic strain at necking instability:(9) The parameter Nvalue is the value of the instability plastic strain taken in uniaxial tension (for which and ). You can then use the relation linking and the stress triaxiality described above to plot the instability strain evolution.
Using the instability plastic strain, an instability criterion variable denoted is either computed:- Incrementally (if Iform = 1)
to take into account the loading history
(10) - Directly (if Iform = 2) to
ignore the loading path history
(11)
If the criterion is reached ( ), the instant value of the damage variable is saved in the value that becomes an element history variable. The necking instability can then be triggered by a stress softening whose equation is:(12) Where,- Damaged stress tensor.
- Undamaged effective stress tensor.
- Critical damage value that triggers stress softening.
- Exponent parameter.
For visualization purposes, the instability curve ( versus ) can be obtained from all the equations above. For instance, if the Nvalue is set to 0.175, the following curve (Figure 4) is obtained.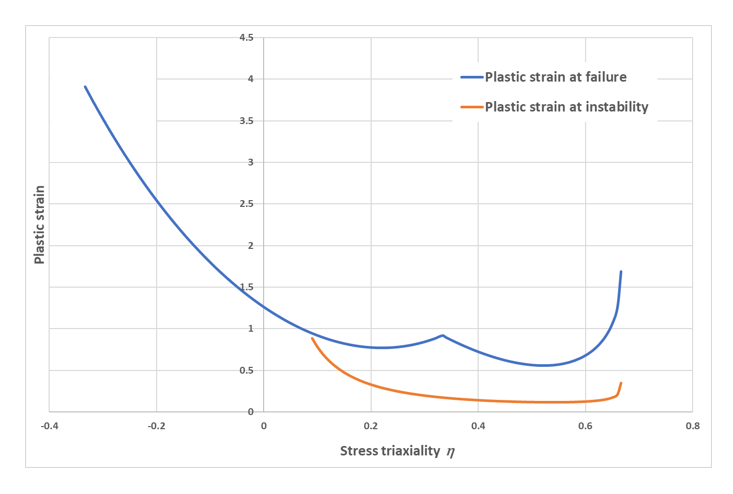
Figure 4. Example of instability curve (orange) and its position with respect to failure criterion (blue)The effect of instability curve is restricted to positive stress triaxiality (as necking only occurs in tension) and only has an effect when it is under the failure criterion curve.
Figure 5 shows several instability curves obtained with different Nvalue parameter values.
Figure 5. Instability curves obtained with different Nvalue parameters - Incrementally (if Iform = 1)
to take into account the loading history
- Element size scaling can be used to regularize the failure and
ensure to obtain an almost constant fracture energy dissipated with
different mesh sizes. This element size dependency is introduced by
computing a size scale factor denoted
defined by the function
fct_IDEl. The size
scaling factor evolution is given with respect to the ratio of initial
element characteristic length divided by a reference size
El_ref (by default = 1.0):
. An additional scale factor
Fscale_El can also be applied to the entire
regularization function. The element size scale factor
thus computed is introduced in the damage
variable evolution equation (and if defined, the instability variable
evolution equation) as:
(13) - Alternatively, the /NONLOCAL/MAT option which is
compatible with Syazwan failure criterion (Figure 6) can be used to regularize the
solution according to mesh size and orientation. If the non-local
regularization is used, the non-local plastic strain is used to compute the
damage evolution (and the instability variable, if used). In that case, the
maximum non-local length parameter LE_MAX is used instead of the initial
element size if an element size scaling is defined through
fct_IDEl. Also, the
non-local regularization is also available with the “one-step” damage field
initialization.
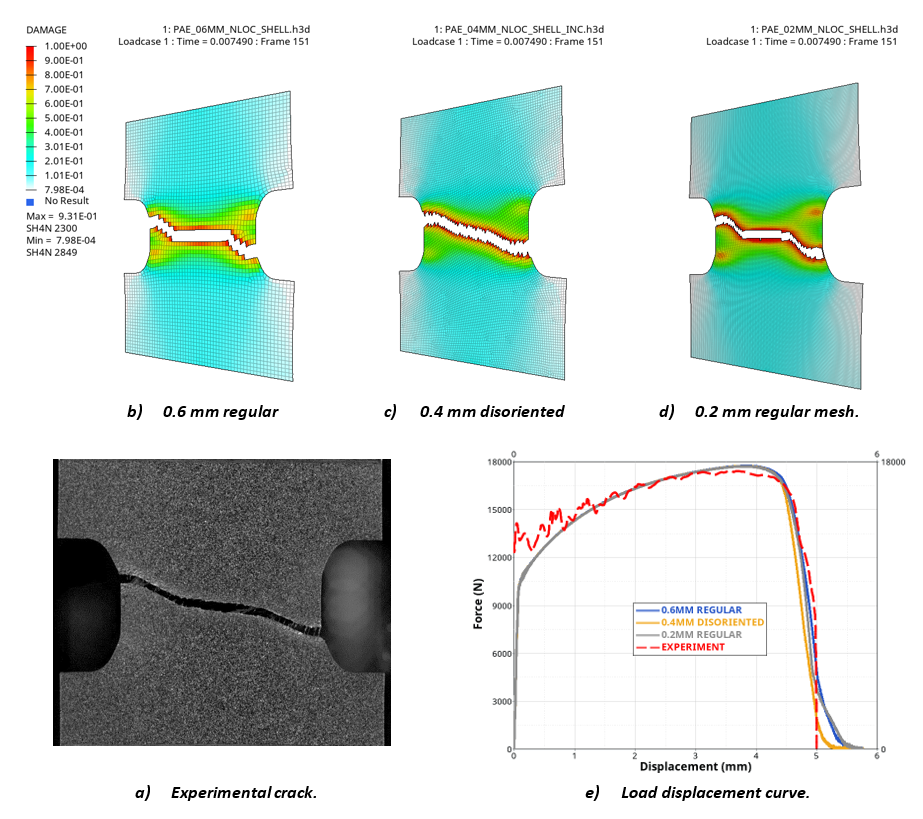
Figure 6. Example of /NONLOCAL/MAT option cumulated with /FAIL/SYAZWAN on automotive DP450 steel