Block Format Keyword Describes moving frames. Relative motion with respect to a reference frame. Moving frame
definition differs from /FRAME/MOV. 8
Format
| (1) |
(2) |
(3) |
(4) |
(5) |
(6) |
(7) |
(8) |
(9) |
(10) |
| /FRAME/MOV2/frame_ID |
| frame_title |
| node_ID1 |
node_ID2 |
node_ID3 |
|
|
|
|
|
|
|
Definition
| Field |
Contents |
SI Unit Example |
| frame_ID |
Reference frame identifier
- must be different from all skew identifiers. (Integer, maximum
10 digits)
|
|
| frame_title |
Reference frame
title (Character, maximum 100 characters)
|
|
| node_ID1 |
Node identifier
N1 (Integer)
|
|
| node_ID2 |
Node identifier
N2 (Integer)
|
|
| node_ID3 |
Node identifier
N3 (Integer)
|
|
Comments
- Let a moving reference frame
.
- For each time t,
the frame position and orientation are determined via its original position
and a rotation (orientation)
matrix
.
- Let
be the instantaneous rotational
velocity of
.
- For each time t,
the local coordinates of
a point M with respect to the
frame are related to its coordinates
into the global system, as:(1)
- The relative displacement
of M between time 0 and
t, with respect to the frame is related to its
displacement with regard to the global system, as:(2)
- The relative velocity of
M with respect to the frame is related to its velocity
with regard to the global system, as:(3)
Where,
is the
driving velocity; that is the velocity of the point coincident with
M at time t and fixed with respect
to the reference frame.
- The relative acceleration of
M with respect to the frame M is
related to its acceleration with regard to the global system, as:
(4)
Where,
-
- Driving acceleration
-
- Acceleration, due to Coriolis forces
- For a moving reference frame, the
reference frame position and orientation vary with time and are defined by
N1, N2 and
N3.
The origin of the frame is defined by
the position of N1.
node_ID1and node_ID2 define
node_ID1 and
node_ID3 define
(5)
(6)
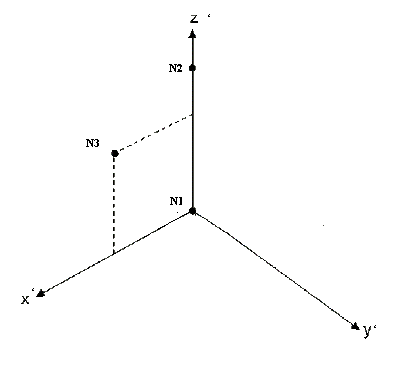
Figure 1.
Reference frame identifier must be different from all skew
identifiers.