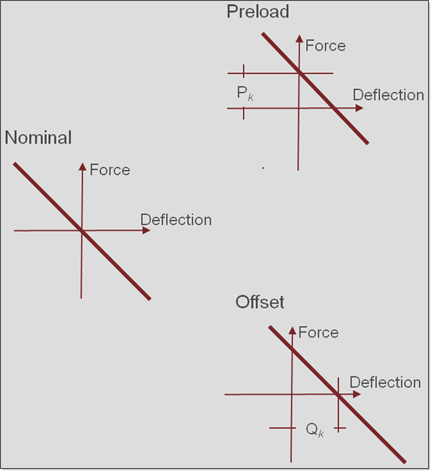
The Preload/Offset/Scale tab displays the force characteristics of your bushing as
you see in the following figure: Figure 1.
Select the Preload/Offset/Scale tab.
Note: The Preload default value = 0; The Offset default value = 0; and the Scale
default value = 1.0. The same holds true for both translational and
rotational directions.
Enter the Preload Force X, Y and Z values as a real
value. Positive preload (Pk) values act to attract the two
bodies.
Enter the Preload Torque X, Y and Z values as a real
value. Positive preload torque values act clockwise about the given axis (that
is, x, y or z) on body 1 and counter-clockwise on body 2.
Enter the Offsets Disp X, Y and Z values as a real
value. Displacement offsets (Qk) are subtracted from the actual
displacement of body 1 with respect to body 2.
Enter the Offsets Angle X, Y and Z values as a real
value. Angle offsets are subtracted from the actual angular displacement.
Enter the Scales Disp X, Y and Z values as a positive,
real value. The displacement scale (Hk) scales both the input
displacement and velocity, but not the displacement offset. The default value is
one (1).
Enter the Scales Angle X, Y an Z values as a positive,
real value. The displacement scale (Hk) scales both the input
displacement and velocity, but not the displacement offset. The default value is
one (1).
Enter the Scales Force X, Y and Z values and
Torque X, Y Z value as positive, real values. Enter a
positive, real value. The force scale (Vk) scales the force function,
but not the preload. The default value is one (1).
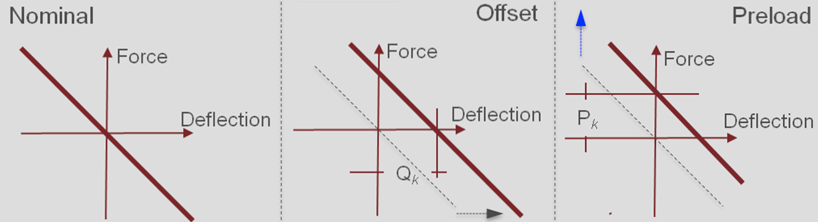
The following figure shows the effect of preload and offset on a bushing: Figure 2.
The bushing force for the Kth direction (x, y, z, ax, ay, az) is
defined by a function:(1)
Where,
Force in the kth direction
Force function in the kth direction
Displacement input in the kth direction
Velocity input in the kth direction
Array of internal state (that is, hysteresis) in the kth
direction
Time
The displacement offset Qk and the displacement scale
Hk modify the displacement and velocity to compute new inputs to
function G as follows:
is the scaled, offset displacement.
is the scaled velocity.
So force is then
computed using the modified inputs and :(2)
Finally, the force/torque preload Pk and
force/torque scale Vk modify the output so the force computation
is:(3)