ボディのマージ
ProjectブラウザのコンテキストメニューにあるMergeオプションを使用すると、2つ以上の剛体をマージできます。この機能は、モデル構築の初期設定段階(通常はCADインポートの後)で特に役立ちます。この機能を使用すると、単一の剛体として表すことができる複数のボディを1つのボディにマージできます。ボディのマージでは常に、以下のことが伴います:
- マージ後の質量 / 慣性および重心が計算されます。
- 他のエンティティ参照(グラフィックス、ジョイントなど)が、マージ元のボディから新しいボディに変更されます。
Mergeオプションを使用するには、マージする2つ(またはそれ以上)の剛体を選択する必要があります。複数のボディは、Projectブラウザで、またはグラフィックス領域からShiftキー + 左クリックすることにより選択できます。
ボディを選択した後、右クリックしてコンテキストメニューを表示し、Mergeオプションを選択します。
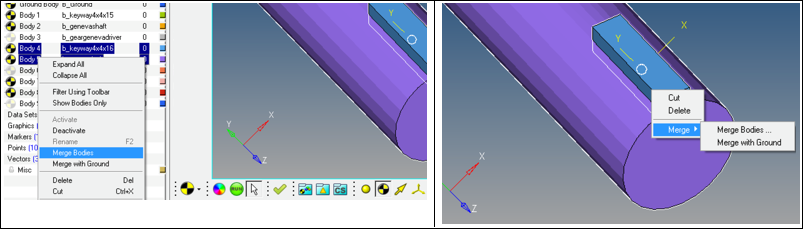
図 1.
図 1.
右クリックのコンテキストメニューには、選択したボディ群を新しいボディへ、またはGround Bodyへマージするためのオプションが用意されています。
Merge Bodiesが選択されると、Merge Bodiesダイアログが表示されます。このダイアログでは、マージされたボディの新しいLabelとVarnameを入力できます。OKをクリックしてダイアログを閉じると、以下の処理が行われます:
- 指定したラベル、変数名、および有効な質量値と慣性値が設定された新しいボディエンティティが作成されます。
- マージ元のボディの有効な重心の位置から新しい重心ポイントが作成され、新しいボディによって使用されます。
上記以外にも、新規ボディとして、またはGroundボディとマージする際に、以下の操作も行われます:
- マージ元のボディに対する他のエンティティ(グラフィックス、ジョイント、ブッシュ、フォースなど)の参照が存在する場合、それらはすべて新規作成されたボディへの参照となります。
- マージ元のボディはモデルから削除されます。
このプロセスの概要を表す例を以下に示します:
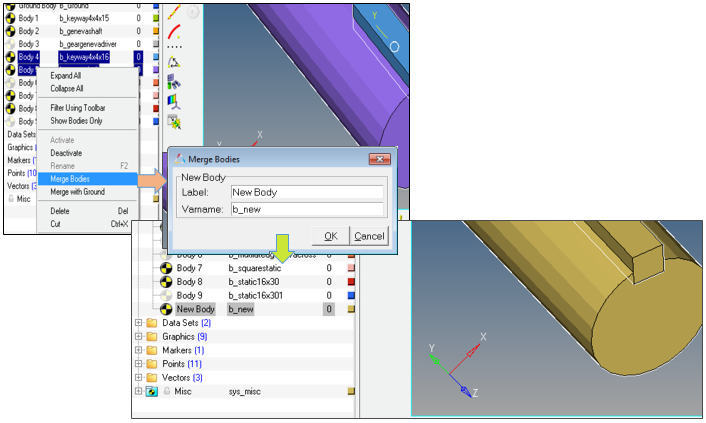
図 2. ボディのマージの例
図 2. ボディのマージの例
この機能の使用の詳細については、チュートリアルMV-1035:CADまたはFEのMotionViewへの読み込みをご参照ください。
重要な注意事項
- Mergeオプションは、ペアのボディ、ポイント質量ボディ、可変形ボディには使用できません。
- この機能は、同一の親システム / アセンブリ内のボディでのみ動作します。属している親コンテナーが異なるボディ同士のマージはサポートされていません。
- 式(パラメータ式)におけるマージ元ボディへの参照は変更されません。このような式は、新規作成されたボディを参照するよう修正する必要があります。
- マージ元ボディに関連する重心ポイントは、モデル内で維持されます。