新機能
MotionSolve 2022の新機能について説明します。
Altair Multi Body Solutions 2022リリースノート
主な特長
Altair Multi Body Simulation Solutions v2022リリースでは、いくつかの機能強化やバグ修正が行われています。
- MotionViewのパフォーマンス向上
- EDEMカップリングの強化
- 2輪車走行安定性イベント
- 軟質土壌路面用タイヤモデル
- CDTireの空気圧設定
- タイヤ試験治具-複合スリップ
- N-ポストレポート
- Applus IDIADA テストコース路面モデル
- XenomatiX® スキャン路面モデル
これらの機能の詳細や、追加された機能強化、解決された問題点については、以下の通りです。
新機能
- MotionViewのパフォーマンス向上
- MotionViewコアがアップグレードされ、モデルの読み込みと編集時間が改善されました。大規模なアセンブリベースおよびシステムベースのモデルの読み込み時間は、以前のバージョンと比較して最大10倍高速化されました。同様に、これらのモデルのソルバーデックのエクスポートも最大で4倍高速化されました。CADベースのモデルを読み込む時間も改善されています。
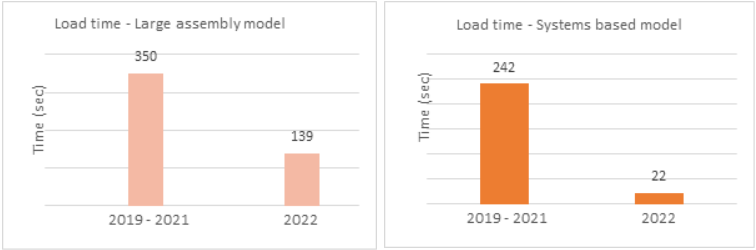
図 1. - EDEMカップリングの強化
- MotionView/MotionSolveは、最先端のバルク材料シミュレーションツールであるAltair EDEMとインターフェースを有しています。EDEMは、砂、顆粒、被膜、草、岩盤などのバルク材料の挙動をシミュレートして解析する離散要素法(DEM)をベースにしています。このカップリングでは、機械部分をMotionViewでモデル化し、バルク材をEDEMで定義しています。MotionViewを使用することで、EDEMに直接形状を転送し、MotionSolveとEDEMソルバー間の連成シミュレーションを開始することができます。今回のリリースでは、MotionViewからEDEMへのジオメトリラベルの転送を新たに追加しました。EDEM で MotionView/MotionSolve のボディに接続されるグラフィックは、component_0000、component_0001 などの名前を付ける必要がなくなりました。これは、EDEMグラフィックをMotionView/MotionSolveボディに関連付けるのに非常に役立ちます。注: この機能は、EDEM 2022以降で動作します。
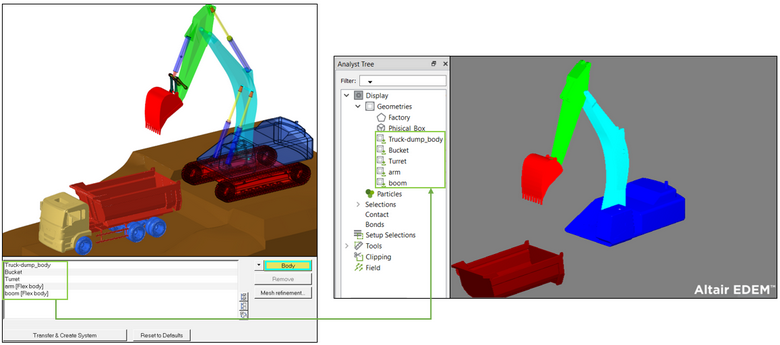
図 2.さらに、MotionSolveはEDEMとの連成シミュレーションのためのSave/Load機能をサポートしています。指定した時刻で結果を保存し、保存したポイントから再開することができます。メリットは2つあります。- 中間結果を表示し、必要に応じてMotionSolveまたはEDEMのいずれかのモデルを調整します。
- 中断した連成シミュレーションは、最初からやり直す必要はなく、保存した時点から再開することができます。
- 2輪車走行安定性イベント
- 傾斜車両(特に2輪車)の安定性を評価するために、MotionViewに新しいイベントが追加されました。このイベントでは、ウィーブとウォブルのモードを理解するために、車両に与える外乱をパルス力または一般的な力で定義して、線形解析または過渡解析を実行することができます。さまざまな路面での車両シミュレーションが可能です。走行安定性解析のレポートセッションには以下が含まれます:
- 線形解析: イベントの固有値と固有モードのアニメーション(.eigファイル)。
- 過渡応答解析: イベントのアニメーション、パルスまたは外乱を受けた際のステアリングホイール角、車体のロール角、ヨー角およびそれらのFFT振幅。
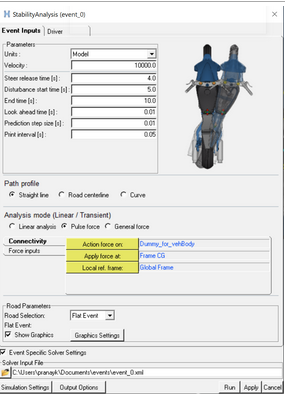
図 3. 2輪車の走行安定性イベント - 軟質土壌路面用タイヤモデル
- MotionView/MotionSolveは、軟質土壌路面と相互作用する新しい経験則タイヤモデルを提供します。圧縮性のある路面を横断する車両の動的挙動を研究するための、計算効率の良い方法を提供します。土壌の特性は、BekkerとWongによって提案されたよく知られた方程式で表現されます。さらに、軟質土壌路面へのタイヤの沈み込みを可視化するグラフィックを追加実装しました。より複雑で計算コストのかかるMotionSolve、EDEM、PME FlexTireの連成シミュレーションを行う前に、まずはこのタイヤモデルで初期設計を行うことをお勧めします。
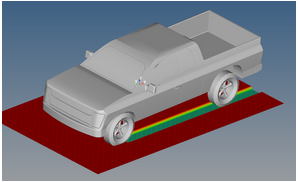
図 4. HyperViewによる軟質土壌路面とタイヤモデルのポスト処理 - CDTireの空気圧設定
- AutoTireパネルに新しいフィールドを追加し、CDTireモデルの空気圧を含めるようにしました。空気圧の設定を使用すると、車両シミュレーション中にタイヤのパンクや平坦化の影響をシミュレートできます。
- タイヤ試験治具 - 複合スリップ
- MotionViewのタイヤ試験治具オプションは、複合スリップ試験をシミュレートします。このテストは、多方向の力を受けるイベントでのタイヤモデルの限界を評価するのに役立ちます。複合スリップ試験のレポートセッションには、アニメーション、タイヤ力プロット、スリップ値、クロスプロットおよび正規化プロットが含まれます。
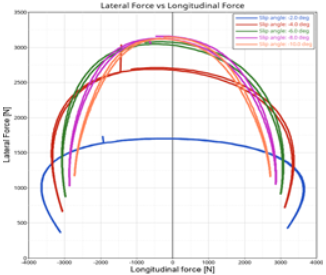
図 5. クロスプロット:横力 vs 縦力 - Nポストレポート
- nポスト試験装置の後処理を簡略化し、車両の振動解析や荷重評価を支援する結果レポートが用意されています。このレポートは、HyperWorksセッションのページとウィンドウのリストを開き、イベントのアニメーション、車体加速度、ハンドル加速度、ホイール荷重、アクチュエータ変位、およびアクチュエータ荷重を表示するものです。重要: 既知の問題 - このリリースでは、n-Postレポートの重ね書きはサポートされていません。
- Applus IDIADA テストコース路面モデル
- Applus+は、試験・検査・認証の分野でサービスやソリューションを提供しています。スペインのIDIADA本社には、370ヘクタールの実験場があり、さまざまなテストコースが設けられています。これらのテストコースの仮想表現は、MotionView/MotionSolveのシミュレーションで路面モデルとして利用することができます。路面ファイルは、高解像度スキャンから抽出され、実表面のマクロな凹凸をすべて捉えています。路面ファイルは、Altair Partner Allianceを通じてご利用可能です。IDIADA Spain Virtual Proving Ground(ISVPG)を直接MotionView/MotionSolveのモデルに統合することで、車両の設計・開発活動を加速させることができます。
図 6. Applus IDIADA スペイン・バーチャル実験場 - XenomatiX® スキャン路面モデル
- XenomatiX®は、地方道、高速道路、港湾岸壁、空港滑走路、あるいはオフロードなど、あらゆる道路ネットワークまたはその一部のデータを測定、収集します。データはsolid-state方式のLiDARセンサーのXenoTrackで計測し、路面ソフトウェアのXenoWareで解析しています。XenomatiX®のスキャンした路面データのサンプルセットが、MotionView/MotionSolveのシミュレーションで路面モデルとして使用できるようになりました。路面ファイルは、Altair Partner Allianceを通じてご利用可能です。
- MotionSolveオンラインコミュニティ
- Altairでは、専門家によるオンラインコミュニティを開催し、より広いCAEコミュニティと見識を共有し、コラボレーションを図っています。このコミュニティには、フォーラムやユーザーグループがあり、他のユーザーからサポートを受けながら疑問点を解決することができます。MBSソリューションズコミュニティへのアクセスはこちらから。このフォーラムに参加することによって、オンラインディスカッションへの参加、様々な活用例の入手などが可能となり、MotionView/MotionSolve ユーザーとして新たな発見、学習、成長するための貴重なリソースとなります。
- HyperWorksスタートアップダイアログ
- Windowsの”スタート”メニューでは、個々のクライアントのショートカットが、クライアント、プロファイル、ディレクトリ、または最近のモデルやセッションの選択など、ニーズに応じたHyperWorksの起動方法を提供する単一のショートカットに置き換えられています。
機能強化
- MotionViewでは、弾性体ボディを接続せずにソルバーデックにエクスポートすることができます。
- 弾性体ボディ作成ツール(Flexprep)は、FEM入力ファイル中のOptiStruct FREEフォーマットのステートメントを読み取ります。
- SpringDamperパネルのPreloadタブは、StiffnessまたはDampingが線形でないプロパティを持つ場合、非アクティブになります。
- EDEMへのジオメトリ転送に失敗した場合、MotionViewはより明確なエラーメッセージを表示します。EDEMへのジオメトリ転送時に、EDEMのDLLパスのバージョンが不一致の場合、警告メッセージが表示される不具合が修正されました。
- CM Labs Vortexへのエクスポートは、剛体グループの転送をサポートしています。
- SpringDampersのPreloadを制御する新しいオプションが利用可能です。
- ユーザー定義出力では、コンポーネント名と単位(cnamesとcunits)の使用がサポートされています。
- MotionSolveのPTCV(point-to-deformable-curve constraint)に、ポイントマーカーのz軸をカーブの法線または接線に強制するオプションの属性が追加されました。
- MotionSolveは、業界で広く受け入れられているIntel® Math Kernel Library(MKL)を数学ルーチンに使用しています。これらのルーチンは高度に最適化され、最大のパフォーマンスを発揮するためにスレッド化されています。今回のリリースで、MotionSolveはMKLのバージョンを2019.5から2020にアップグレードしました。
- MotionSolveのPythonベースのAPI MSolveは、機器間のメッセージ転送を行うパブリッシュ・サブスクライブのネットワークプロトコルであるMQTTをサポートしています。
- CDTireとF-Tireのタイヤ変形は、HyperViewで可視化することができます。
- トラックライブラリに空力特性が追加されました。
- Fialaタイヤは、スリップまたは力の関数としてタイヤ摩擦(Mu)カーブを入力するオプションが追加されました。
- MotionSolveは、F-Tireバージョン2021.4に対応しています。
- MotionSolveは、OpenCRGバージョン1.2をサポートしています。
解決された問題点
- mdl_batchを書き込み不可能な場所から実行すると、HyperMesh の起動に失敗する。
- データセット内のテーブルのセル高さが適切でなかった。
- 車両モデル上のエンティティを分離すると、AutotireとAltairDriverが壊れる。
- Motionエンティティが未解決の場合、自由度チェックでアプリケーションエラーが発生。
- エクスポートされたMotionSolveソルバーデッキ(PythonベースのAPI)のH3Dファイル参照が、絶対パスに変更されました。
- アプリケーション システム作成ツール「Belt-Pulley」で複数のシステムを作成する際に発生するエラー。
- データMDLインポート時の、Table Formのレコード数に関するエラー。
- Vortex Studioへのエクスポートにおいて、ユーザーのホームディレクトリの下に無題のフォルダーが作成される問題。
- 弾性体ボディのIDの割り当て処理で、runをクリックした際に共有されたDefinitionが壊れる。
- グラウンドしたボディを含むモデルをVortexに転送する際にアプリケーションエラーが発生する。
- システムパネルのInitial ConditionsタブでICを割り当てた場合に、ICが上書きされる個々のボディがリストアップされない。
- 特定のサーフェス限定グラフィックスで、誤ったイナーシャプロパティが報告される。
- システム定義名が同じ定義名のシステムにインポートすると、アプリケーションエラーになる。
- タブで発生するアプリケーションエラー。
- 特定のケースで発生する、CVCV拘束のルート探索の問題。
- 一部の使用ケースで、AltairDriverを使用すると、ライセンスが不正にスタックされる問題。