MotionSolveユーザーズガイド
MotionSolveは、力学の原理に基づいたシステムレベルのマルチボディソルバーです。
MotionSolveは、マルチボディシステムの記述を取得し、運動方程式を自動的に定式化して、それらを数値的に解きます。解析の結果は、システムの応答を可視化するために、プロッティングおよびアニメーション表示することが可能です。プロッティングはエンジニアリング計算の詳細の検証に、アニメーション表示は主として全般的なシステムの挙動の視覚的な検証に役立ちます。
- 製品開発にかかる時間とコストの削減
- 品質の向上
- 設計および製造リスクの軽減
- 製品革新の加速化
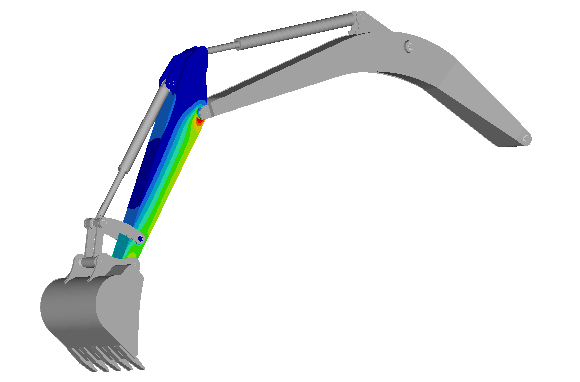
図 1. 弾性体マルチボディシステムの例: パワーショベルのアームのモデル
MotionSolveは、Altair Simulationのソフトウェアフレームワークに全面的に統合されているので、Altair Simulationのすべてのアプリケーションとデータを共有できます。
次に、Altair Simulationの各製品をMotionSolveと組み合わせて使用する方法を簡単に説明します。
- MotionView
- MotionViewは、MotionSolveを使用して解析できる複雑なモデルの作成を実現するグラフィカルプリプロセッサです。
図 2. - HyperGraph 2D
- HyperGraph 2Dは、MotionSolveの結果から2Dプロットを作成し、それらに対して技術上の詳細な計算を実行できるグラフィカルプリプロセッサです。
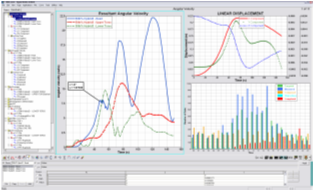
図 3. - HyperGraph 3D
- HyperGraph 3Dは、MotionSolveの結果から3Dプロットを作成して、システムの挙動を可視化できるグラフィカルプリプロセッサです。
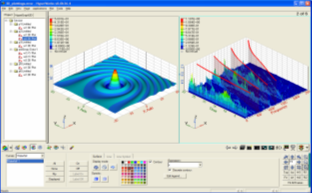
図 4. - HyperView
- HyperViewは、MotionSolveの結果をアニメーション表示し、システムの挙動全体を評価できるグラフィカルポストプロセッサです。
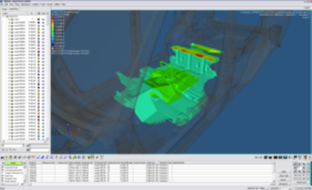
図 5. - HyperStudy
- HyperStudyでは、実験計画法(DoE)を使用してシステムモデルの知見を得るだけでなく、そのモデルを最適化して目的のパフォーマンスを達成することもできます。また、確率統計解析を使ってメカニズム設計におけるリスクにアクセスすることも可能です。
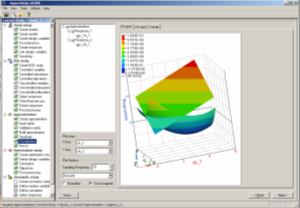
図 6. - OptiStruct
- FEAソルバーであるOptiStructでは、区分モード合成(CMS)技法を使用して、詳細な有限要素モデルを、効率的な計算が可能な弾性体表現に縮小できます。続いて、MotionSolveで弾性体を使用してパートのコンプライアンスを捕捉し、剛体モデル全体にわたって大幅な精度の向上を実現できます。
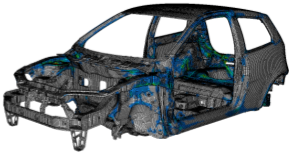
図 7. - HyperMesh
- HyperMeshはグラフィカルな有限要素プリプロセッサであり、剛体または弾性体のマルチボディモデルを作成し、MotionSolveを使用してそのモデルを解析できます。また、OptiStructを使用して弾性体生成を目的とした有限要素モデルを作成する際にも、HyperMeshが効果的です。これらの弾性体はMotionSolveのモデルで使用できます。
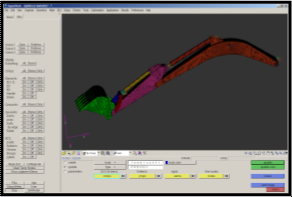
図 8.
MotionSolveおよびAltair Simulationフレームワーク
MotionSolveは、ほとんど無限に近いバリエーションの機構システムおよびメカトロニクスシステムをモデル化および解析できる、モデリング要素の総合的な環境を提供します。モデリング要素の例としては、剛体、弾性体、回転やユニバーサルなどのジョイント、外部からの力、規定された動き、センサー、コントローラなどが挙げられます。これらの要素は、車両、ハードディスクドライブ、航空機、人工衛星、ロボットといったモデルシステムに組み合わされます。このようなシステムは、モーション、機械の特長、パワーの要件、振動、安定性、荷重、作動力、干渉、貫通、応力分布、耐久性、操縦性など様々な性能基準について解析できます。こういった総合的なシステムレベルの情報をもつことによって、異なる概念設計案を効率的に評価し、ランク付けすることが可能となります。そのうえで、DOEや最適化を使って設計を微調整し、確率統計解析を使ってロバスト性および関連するリスクの評価が行えます。
プラットフォーム
MotionSolveは、以下のプラットフォーム上で動作します:
| プラットフォーム | ビット | 必要なシステム構成 |
|---|---|---|
| Linux | 64ビット | RedHat Enterprise Linux 6.6 RedHat Enterprise Linux 7.2 SLES 12 SP2 |
| Windows | 64ビット | Windows 7/10 Windows Server 2008 R2 |
Altair Simulationによるプラットフォームのサポートの詳細については、Altair HyperWorks IntroductionオンラインヘルプのPlatform Supportをご参照ください。