MV-1010:3Dメッシュ間の接触のシミュレーション
本チュートリアルでは、MotionSolveバージョン14.0以降の新しい3D剛体接触機能について説明します。
- 接触のシミュレーションに適したグラフィック設定のCAD形状をインポート
- マルチボディモデル内のメッシュ化された形状間の3D剛体接触をセットアップ
- 過渡解析を実行し、それらの形状間の接触を計算
- 自動的に生成されたレポートを用いて結果をポスト処理
これらの目的のために、溝付きリンクモデルを使用します。
本チュートリアルは、メッシュ間の接触アプローチを使用します。このアプローチは、シミュレーション中に接触するボディのサーフェスメッシュを利用します。サーフェスメッシュは、3D剛体のサーフェスを正確に表現する内部的に結合された三角形のセットとして定義されます。MotionSolveはそのようなサーフェスメッシュに関して所定の条件を規定しています。- 各コンポーネントメッシュは、閉空間を形成している必要がある。すなわちメッシュには、オープンエッジ(1つの要素のみの一部分であるエッジ)やT接合(共通するエッジで結合しているT字形を成す2つの要素)を含んでいてはならない
- メッシュは均等なサイズでなければならない
- 要素のサーフェスの法線は、接触の方向を指している
接触のモデリングの最良の方法については、ここをクリックしてください。この種の3D剛体のメッシュ化表現についてMotionSolveは、複数のサーフェスメッシュ間の貫通を検知し、続いて貫通の深さと接触力を計算する数値的衝突エンジンを使用します。このアプローチを用いて解析され得る3D接触の適用例は、数多くあります(ギア、カム、接触する部品を含んだ機構など)。
- 溝付きリンクモデル
- 溝付きリンク機構(スコッチヨーク機構とも呼ばれる)は、入力の回転運動を、溝付きリンクまたはヨーク部の連続的または断続的な並進運動に変換します。運動は、接触する機構のパート間の接触力を介して伝えられます。接触垂直抗力と摩擦力は共に、運動の伝達に関与し得ます。このような機構は、バルブアクチュエーター、エアコンプレッサー、一部のレシプロエンジンやロータリーエンジンなどに共通して応用されます。
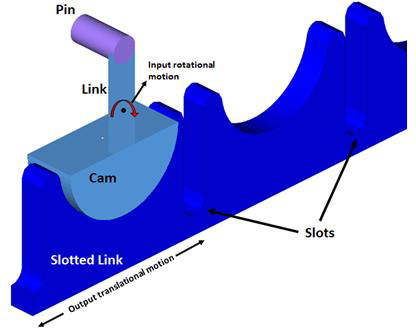 図 1.
図 1.