In this tutorial, you will learn how to define end conditions for a maneuver or a
sub-event, write parametric expressions, and to define events as multiple sub-events
executed sequentially
End conditions
Conditions to end a particular maneuver before given simulation end
time
Examples of the end conditions can be – End maneuver when longitudinal
velocity is greater than 10 m/s or when roll angle reaches steady
state
End conditions can be logically coupled (OR-ed or AND-ed) by splitting
them into groups
Multi-maneuver events
Events consisting for more than one maneuver – these maneuvers are
executed sequentially
Controllers can only be changed while switching the maneuvers
Hence, rule of thumb – whenever need to change the controller, change
the maneuver
Driver does following while switching the maneuvers
Halts previous maneuver
Saves the signals value that acts as initial value for next
maneuver in case of parametric expressions , there is a list of
signals that driver monitors. Please refer to the documentation
for more details.
Executes the change of/in controller
Starts new maneuver
Examples: Fishhook, J-turn, Throttle off cornering analysis
Parametric Expressions
When in a multi-maneuver event, expressions need to be re-evaluated
before the start of the maneuver in order to maintain the continuity of
the signals.
{ Expression in Curly Braces }
Instruction to driver to evaluate the expression before
giving it to MotionSolve
{SIGNAL}
Evaluated as VARVAL(signal solver variable id)
{SIGNAL_0}
Evaluated as Signal Value at the end of last maneuver
{%SIGNAL}
Evaluated as {SIGNAL} – {SIGNAL_0}
Driver evaluates the expressions for the maneuver before the start of
the maneuver
Example:
Throttle off cornering event
Maneuver 1
Constant radius cornering, constant radius path with constant velocity -
until roll angle reaches its maximum and stabilizes.
Maneuver 2
Step down the throttle while following the same path.
In this event, Maneuver 1 would typically consist of closed loop steering and
throttle controllers. In Maneuver 2, the steering controller still remains the same,
however the throttle controller is open loop, type expression – ‘STEP(TIME – end
time of maneuver 1 , 0, throttle value at the end of maneuver 1, 0.5, 0)’.
Figure 1.
Assemble the Vehicle
Follow the instructions in Step #1 of MV-8000 to create the vehicle with the
topology as provided below.
Page
Label
Selection
Default (Yes/No)
1
Model type
Full vehicle with advanced
driver
No
2
Driveline configuration
Front wheel drive
Yes
3
Vehicle body
Body
Yes
3
Front suspension
Frnt macpherson susp (1 pc. LCA)
Yes
3
Steering linkages
Rackpin steering
Yes
3
Rear subframe
None
Yes
3
Rear suspension
Rear quadlink susp
Yes
3
Powertrain
Linear torque map powertrain
Yes
3
Signal generator
Driver signal generator
Yes
3
Tires
FIALA
Yes
4
Steering column
Steering column 1 (not for Abaqus)
Yes
4
Steering boost
None
Yes
5
Front struts
Frnt strut (with inline jts)
Yes
5
Front stabilizer bars
Frnt stabar with links
No
5
Rear struts
Rear strut (with inline jts)
Yes
5
Rear stabilizer bars
Rear stabar with links
No
6
Front jounce bumpers
None
Yes
6
Front rebound bumpers
None
Yes
6
Rear jounce bumpers
None
Yes
6
Rear rebound bumpers
None
Yes
7
Disk brakes
Disk brakes
Yes
7
Front driveline
Independent fwd
Yes
8
Next
No
9
Finish
No
Adding Driver Analysis
Use the Task Wizard to load the driver analysis.
Figure 2.
Specify Vehicle Parameters
In this step, you will specify parameters for the vehicle.
Feedforward controllers require vehicle parameters because
they model the vehicle. Vehicle parameters do not need to be precise. Most of the
vehicle parameters required by the driver can be automatically calculated from the
vehicle model.
Specify the parameters for the vehicle.
Write an Altair Driver File (ADF) Driving Event
Fish Hook Event
We will model this event in three maneuvers.
Open any text editor and copy and paste the following text into it. Important:
Important: All blank lines must be removed prior to saving the
file!
Be sure to read through the comments for a better understanding on what is
written in the ADF.
$-----------------------------------------------------------------ALTAIR_HEADER[ALTAIR_HEADER]
FILE_TYPE = 'ADF'
FILE_VERSION = 1.0
FILE_FORMAT = 'ASCII'
$--------------------------------------------------------------------------UNITS[UNITS](BASE)
{length force angle mass time}
'meter' 'newton' 'radians' 'kg' 'sec'
$--------------------------------------------------------------VEHICLE_IC[VEHICLE_INITIAL_CONDITIONS]
VX0 = -17.5
VY0 = 0.0
VZ0 = 0.0
$--------------------------------------------------------------STEERING_STANDARD[STEER_STANDARD]
$Upper and lower bounds are kept to match the event requirement of saturating at
$270 deg and -540 deg respectively
MAX_VALUE = 4.712
MIN_VALUE = -9.425
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$--------------------------------------------------------------THROTTLE_STANDARD[THROTTLE_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$---------------------------------------------------------------BRAKING_STANDARD[BRAKE_STANDARD]
MAX_VALUE = 1
MIN_VALUE = 0
SMOOTHING_FREQUENCY = 5
INITIAL_VALUE = 0.0
$-----------------------------------------------------------------MANEUVERS_LIST[MANEUVERS_LIST]
{name simulation_time h_max print_interval}
'GO_STRAIGHT' 2.0 0.01 0.1
'LEFT_TURN' 12.0 0.001 0.1
'RIGHT_TURN' 10.0 0.001 0.1
[GO_STRAIGHT]
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_CONSTANT_STEER NONE
THROTTLE FEED_FORWARD_TRACTION NONE
BRAKE FEED_FORWARD_TRACTION NONE
$---------------------------------------------------------------------MANEUVER_2[LEFT_TURN]
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_LEFT_STEER NONE
THROTTLE FEED_FORWARD_TRACTION NONE
BRAKE FEED_FORWARD_TRACTION NONE
$We want to end the maneuver if the roll rate reaches steady state i.e. d(Roll rate)/dt = 0$(tolerance = 0.005) for 0.5 seconds(END_CONDITIONS)
{SIGNAL GROUP ABS OPERATOR VALUE TOLERANCE WATCH_TIME}
ROLL_RATE 0 Y SS 0 0.005 0.5
$---------------------------------------------------------------------MANEUVER_3[RIGHT_TURN]
TASK = 'STANDARD'
(CONTROLLERS)
{DRIVER_SIGNAL PRIMARY_CONTROLLER ADDITIONAL_CONTROLLER}
STEER OL_RIGHT_STEER NONE
THROTTLE FEED_FORWARD_TRACTION NONE
BRAKE FEED_FORWARD_TRACTION NONE
$--------------------------------------STEER for Maneuver 1[OL_CONSTANT_STEER]
TAG = 'OPENLOOP'
TYPE = 'CONSTANT'
VALUE = 0
$--------------------------------------STEER for Maneuver 2$Ramp up the steering wheel @ 360 deg per send[OL_LEFT_STEER]
TAG = 'OPENLOOP'
TYPE = 'EXPRESSION'
SIGNAL_CHANNEL = 0
EXPRESSION = '{STEER_0} + {%TIME}*PI*2'
$--------------------------------------STEER for Maneuver 3[OL_RIGHT_STEER]
TAG = 'OPENLOOP'
TYPE = 'EXPRESSION'
SIGNAL_CHANNEL = 0
EXPRESSION = '{STEER_0} - {%TIME}*PI*2'
$--------------------------------------THROTTLE and BRAKE controller for entire event[FEED_FORWARD_TRACTION]
TAG = 'FEEDFORWARD'
TYPE = 'FOLLOW_VELOCITY'
LOOK_AHEAD_TIME = 0.5
DEMAND_SIGNAL = 'DEMAND_VEL'
$----------------Demand Velocity[DEMAND_VEL]
TYPE = 'CONSTANT'
VALUE = 17.5
Run the simulation .
Observe the results.
Maneuver 2 stops when roll rate is consistently 0 (with mentioned tolerance)
for 0.5 seconds.
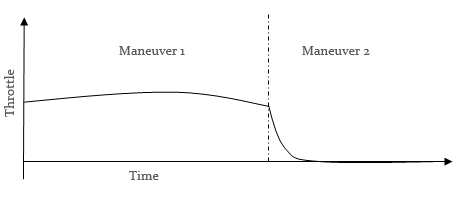 Figure 1.
Figure 1.  Figure 2.
Figure 2.  .
.
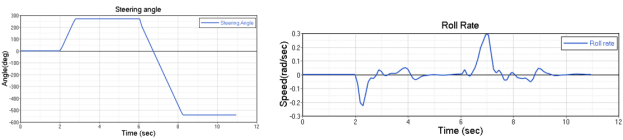 Figure 3.
Figure 3.