MV-8003: Gear and Clutch Control
In this tutorial, you will learn how to interface gear clutch control for vehicles with manual transmission.
- Gear clutch controller
- The Engine speed based shift controller upshifts whenever engine speed goes above the upshift RPM, and it downshifts when the engine speed goes below the downshift RPM. The Gear shift controller also controls the throttle and clutch signal as shown in the figure below.
-
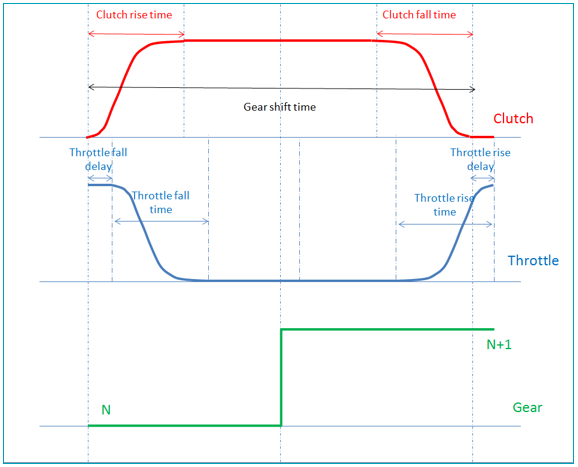 Figure 1.
Figure 1.
Assemble the Vehicle
In this step, you will assemble the vehicle using the Assembly Wizard.
-
Ensure the MBD-Vehicle Dynamics Tools preference file loaded is for all of the
MotionView functionality of the Advanced Driver
to work properly.
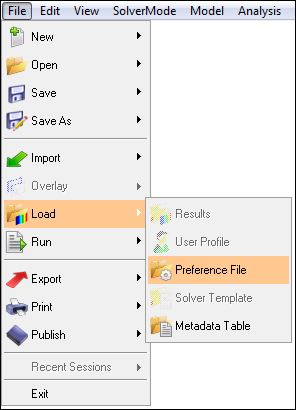 Figure 2.
Figure 2. 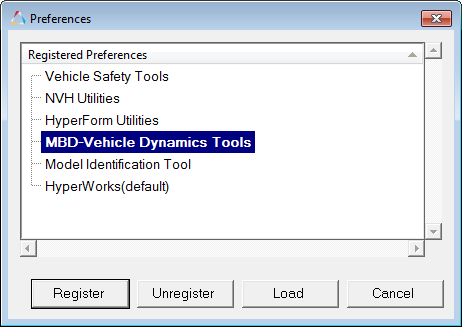 Figure 3.
Figure 3. -
From the menu bar, select .
In Script an Open Loop Acceleration Event, a linear torque map powertrain will be used to avoid the complexity of adding controllers for gear and clutch.
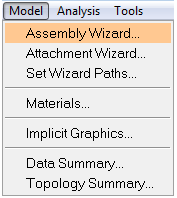 Figure 4.
Figure 4. -
Select the Full vehicle with advanced driver
option.
This takes care of all the dependencies of the advanced driver.
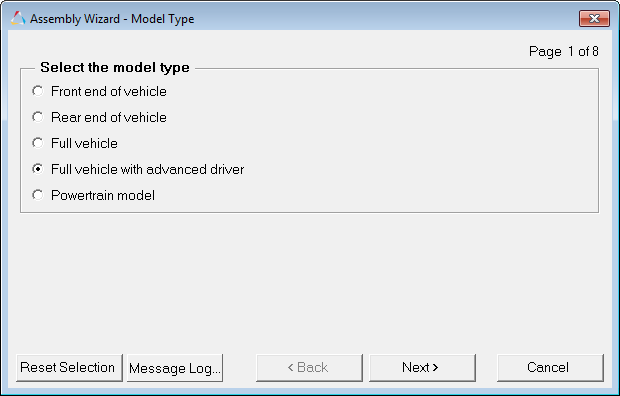 Figure 5.
Figure 5.
Add Driver Analysis
In this step, you will use the Task Wizard to load the driver analysis.
-
From the menu bar, select .
 Figure 6.
Figure 6. -
Select AltairDriverFile from the Type drop-down
menu.
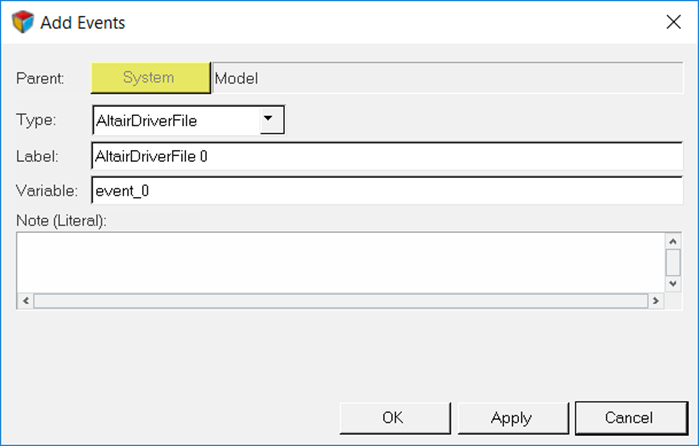
Figure 7.Tip:Selecting
 (Altair Driver
icon) will open up the Altair Driver panel.
This automatically resolves all of the vehicle attachments for the
Altair Driver.
(Altair Driver
icon) will open up the Altair Driver panel.
This automatically resolves all of the vehicle attachments for the
Altair Driver.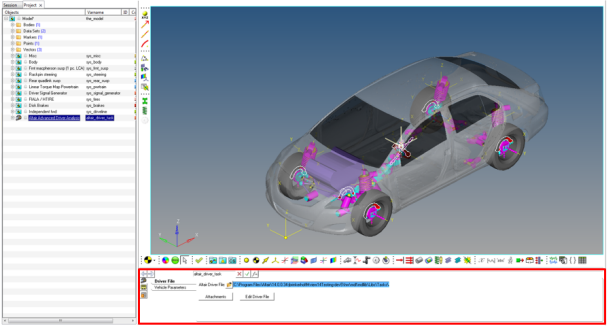 Figure 8.
Figure 8. Selecting the AltairDriverFile 0 will open up the driver event panel. Selecting the Event Editor button will open the Altair Driver File dialog.
Specify Vehicle Parameters
In this step, you will specify parameters for the vehicle.
Write an Altair Driver File Driving Event
In this step, you will create a constant radius with constant velocity event, a straight line acceleration event, and a path as a table of cartesian coordinates of centerline points event.
Velocity Profile Following with Gear and Clutch Controller
In this step, you will modify the ADF written in Path as a Table of Cartesian Coordinates of Centerline Points Event of MV-8001: Path and Velocity Following and incorporate a gear and clutch controller.
-
Click
 to run the
simulation.
to run the
simulation.