This example shows the advantages of the integral method compared to the conventional
finite element approach for a current sensor. In this case, a current is injected
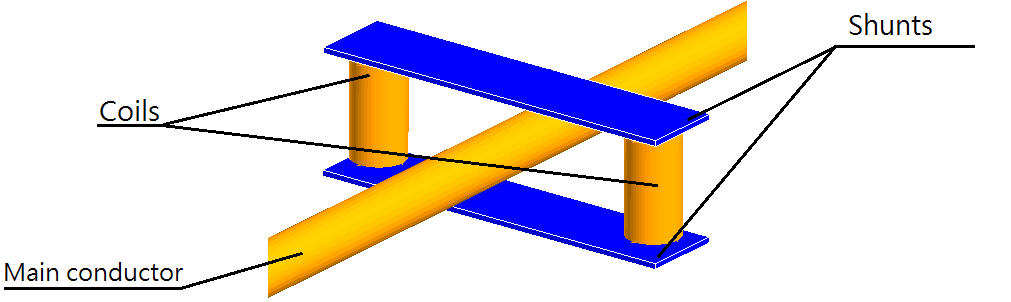
into the main conductor and we are looking to compute the magnetic flux observed by
the auxiliary coils, as shown in Figure 1.
The characterization of this sensor requires knowledge of its gain and
crosstalk.
Figure 1. Full device
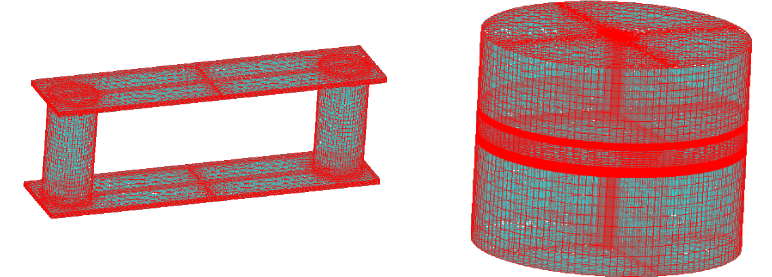
This device being characterized by a large quantity of leakage flux and by the
distances between the conductors that can be large, the use of the conventional
finite element method requires to intensively mesh the surrounding air. To get
results approaching the real the solution, the mesh must be symmetrical and very
dense, which increases the computation time (see Figure 2).
Figure 2. On the left, the mesh of the device. On the right the mesh of the
air.
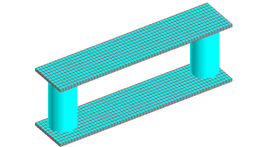
The integral method is much cheaper in terms of meshing elements because we do
not mesh the air anymore (see Figure 3).
Figure 3. Mesh for the integral method
Comparison of the two methods:
Table 1. Computation time for one value of current in the main conductor
Method
Mesh
Solving
Flux computation
Integral
2s
30s
1s
Finite elements
20min
5min
20min
For the computation of the flux in a coil, the volume integral method is
also faster than the finite element method. This magnetic flux is split into two
contributions, the contribution of the other coils and the contribution of the
magnetic parts [2]. In the air and for the other coils we compute the magnetic flux
by a Biot & Savart law. For the magnetic parts the computation is done with the
magnetic vector potential already computed in resolution.
Results
The study of this sensor requires to know its gain defined in the frequency domain by
the following relation:
with
f : the frequency
: the current in the main conductor
: the magnetic flux in the auxiliary coils
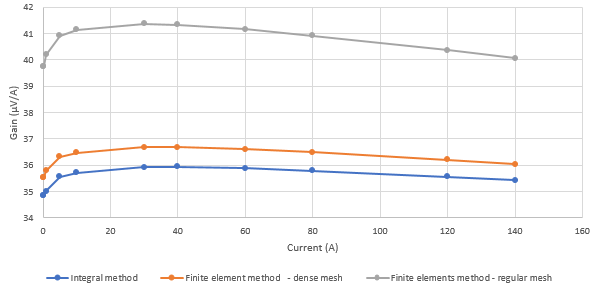
We can compute the gain for several values of current :
Figure 4. Gain of the sensorFigure 4 shows that the finer the mesh is, the more the results will be
close to the real solution and therefore to the solution provided by the integral
method.
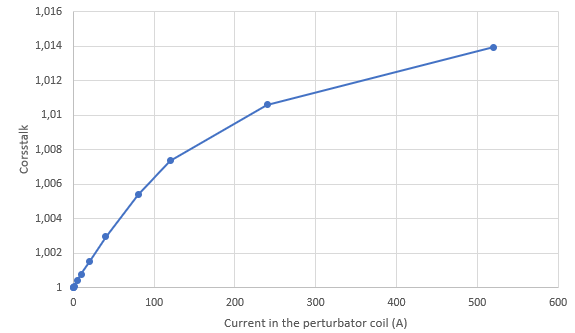
A complete study also requires knowing the crosstalk of the sensor,
with,
G : the gain corresponding to the sensor with an offset on the position of
the main conductor.
Figure 5. Crosstalk of the sensor
Note: Total simulation time with the integral method for this study: 15 minutes.
Note: Total simulation time with finite element method with dense mesh for this study: 6
hours
References
[2] : L. Huang, G. Meunier et al., “General Integral Formulation of Magnetic Flux
Computation and Its Application to Inductive Power Transfer System,” IEEE Trans. on
Mag., vol. 53, no. 6, pp. 1-4, June 2017.