/IMPVEL
Block Format Keyword Defines imposed velocities on a group of nodes.
Format
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /IMPVEL/impvel_ID/unit_ID | |||||||||
| impvel_title | |||||||||
| fct_IDT | Dir | Skew_ID | sens_ID | grnd_ID | frame_ID | icoor | |||
| Ascalex | FscaleY | Tstart | Tstop | ||||||
Definition
| Field | Contents | SI Unit Example |
|---|---|---|
| impvel_ID | Imposed velocity block
identifier. (Integer, maximum 10 digits) |
|
| unit_ID | Unit Identifier (Integer, maximum 10 digits) |
|
| impvel_title | Imposed velocity block
title. (Character, maximum 100 characters) |
|
| fct_IDT | Time function
identifier. (Integer) |
|
| Dir | Direction: X, Y, and Z in
translation; XX, YY, and ZZ in rotation. (Text) |
|
| Skew_ID | Skew identifier.
(Integer) |
|
| sens_ID | Sensor identifier.
(Integer) |
|
| grnd_ID | Node group on which the
imposed velocity is applied. (Integer) |
|
| frame_ID | Frame identifier.
(Integer) |
|
| icoor | Coordinate system usage
type.
(Integer) |
|
| Ascalex | Abscissa (time) scale
factor for
fct_IDT. Default = 1.0 (Real) |
|
| FscaleY | Ordinate (velocity) scale
factor for
fct_IDT. Default = 1.0 (Real) |
or |
| Tstart | Start
time. (Real) |
|
| Tstop | Stop time. Default = 1030 (Real) |
Comments
- The velocity direction must be right justified in the ten characters of field number 2.
- If a velocity is imposed in a frame (frame_ID ≠ 0), the frame nodes must not have an imposed velocity themselves.
- If Tstart and Tstop are specified, the velocity is imposed between these times, but the time versus velocity function is not shifted to begin at Tstart.
- When a sensor is defined sens_ID, the imposed velocity is applied at the time of sensor activation and the function is shifted by the sensor activation time.
- When a sensor sens_ID is used with Tstart and Tstop, the imposed velocity will only occur if the sensor activation time occurs between Tstart and Tstop.
- The
AscaleX and
FscaleY are used to scale
the abscissa (time) and ordinate (translational or angular velocity).The actual load function value is calculated as:
(1) Where, is the function of fct_IDT.
- SKEW and FRAME cannot be defined together. This is SKEW or FRAME.
- If icoor=1, the
directions X, Y, and Z (resp. XX, YY, and ZZ) refer to translations along (resp.
rotations around) the radial direction (r), azimuthal angular direction
(
) and longitudinal direction (Z) (refer to /SKEW/FIX and /FRAME/FIX).
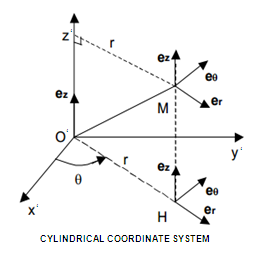
Figure 1. - If icoor=1 when imposing the
translational velocity in the radial, resp. the azimuthal direction, the
velocity of the node is set so that:
(2) (3) with