ACU-T: 5201 Coupled Simulation of a Check Valve using AcuSolve and MotionSolve
Prerequisites
This tutorial introduces you to the workflow for setting up an AcuSolve-MotionSolve co-simulation using HyperWorks CFD. Prior to starting this tutorial, you should have already run through the introductory tutorial, ACU-T: 1000 Basic Flow Set Up, and have a basic understanding of HyperWorks CFD and AcuSolve. To run this simulation, you will need access to a licensed version of HyperWorks CFD, MotionSolve, and AcuSolve.
Prior to running through this tutorial, click here to download the tutorial models. Extract ACU-T5201_pressureCheckValve.x_t and Valve_model.xml from HyperWorksCFD_tutorial_inputs.zip.
Problem Description

Figure 1. Schematic of Check Valve with Spring-Loaded Shutter
The pipe has an inlet diameter of 0.08 m and is 0.3 m long. The check-valve assembly is 0.085 m downstream of the inlet. It consists of a plate 0.005 m thick with a centered orifice 0.044 m in diameter and a shutter with an initial position 0.005 m from the opening, simulating a nearly closed condition. The shutter plate is 0.05 m in diameter and 0.005 m thick. The shutter plate is attached to a stem 0.03 m long and 0.01 m in diameter. The mass of the shutter and stem is 0.2 kg and its motion is affected by a virtual spring with a stiffness of 2162 N/m. The motion of the valve shutter is limited by a stop mounted on a perforated plate downstream of the shutter.
Note that AcuSolve's internal rigid-body-dynamics solver is not able to simulate contact. Therefore, this problem is formulated to avoid contact between the valve and the stop.
- Scale up the fluid forces calculated by AcuSolve
by a factor of 12 to represent the full load on the device when the
displacement of the body is computed.
Using this approach, the full stiffness of the valve spring is used in the rigid-body solution, and the full mass of the valve is used.
- Scale down the mass of the valve and the stiffness of the spring to by a
factor of 12 to match the fraction of the valve geometry to be
modeled.
Using this approach, the loading passed to the rigid-body solver is not scaled.
This second approach is used in this tutorial; the scaled mass of 0.0167 kg and the scaled stiffness of 180.1667 N/m will be used
The fluid in this problem is water, which has a density (ρ) of 1000 kg/m3 and a molecular viscosity (μ) of 1 X 10-3 kg/m-sec.
At the start of the simulation, the flow field is stationary. Flow is driven by the pressure at the inlet, which varies over time as a piecewise linear function shown in Figure 2. As the pressure at the inlet rises, the flow will accelerate as the valve opens. The turbulence viscosity ratio is assumed to be 10.
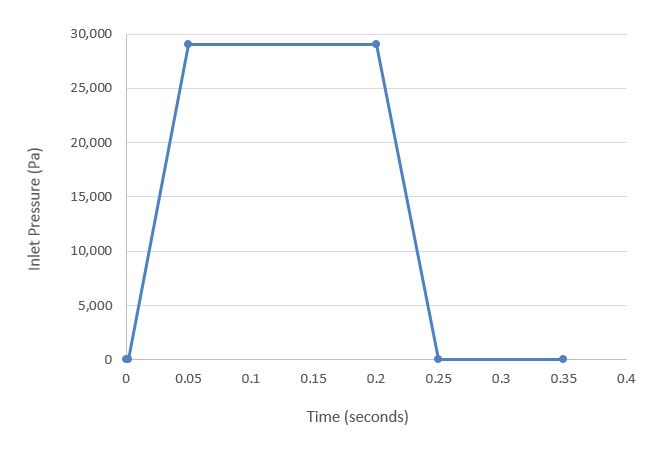
Figure 2. Transient pressure at the inlet
Prior simulations of this geometry indicate that the average velocity at the inlet reaches a maximum of 0.98 m/s. At this velocity, the Reynolds number for the flow is 78,400. When the Reynolds number is above 4,000 it is generally accepted that flow should be modeled as turbulent.
Note that the initial conditions of the flow are actually laminar; however, the increase in flow velocity and flow around the valve shutter is expected to cause a rapid transition to turbulent conditions. Therefore, the simulation will be set up to model transient, turbulent flow. When performing a transient analysis, convergence is achieved at every time step based on the defined stagger criteria. Mesh motion will be modeled using arbitrary mesh movement (arbitrary Lagrangian-Eulerian mesh motion).
For this case, the transient behavior of interest occurs in the time it takes for the pressure to ramp up and ramp back down, which is given by the transient pressure profile. To allow time for the spring to recover additional time will be simulated. For this tutorial 0.1 s is added after the pressure drops back to initial conditions for a total duration of 0.35 s.
Another critical decision in a transient simulation is choosing the time increment. The time increment is the change in time during a given time step of the simulation. It is important to choose a time increment that is short enough to capture the changes in flow properties of interest, but does not require unnecessary computation time. The change in inlet pressure from initial conditions to maximum occurs over 0.048 s. A time increment of 0.002 s would allow for excellent resolution of the transient changes without requiring excessive computational time.
Start HyperWorks CFD and Create the HyperMesh Model Database
-
Create a new .hm database in
one of the following ways:
- From the menu bar, click .
- From the Home tools, Files tool group, click the Save As tool.
Figure 3.
Import and Validate the Geometry
Import the Geometry
-
In the Geometry Import Options dialog, leave all the
default options unchanged then click Import.
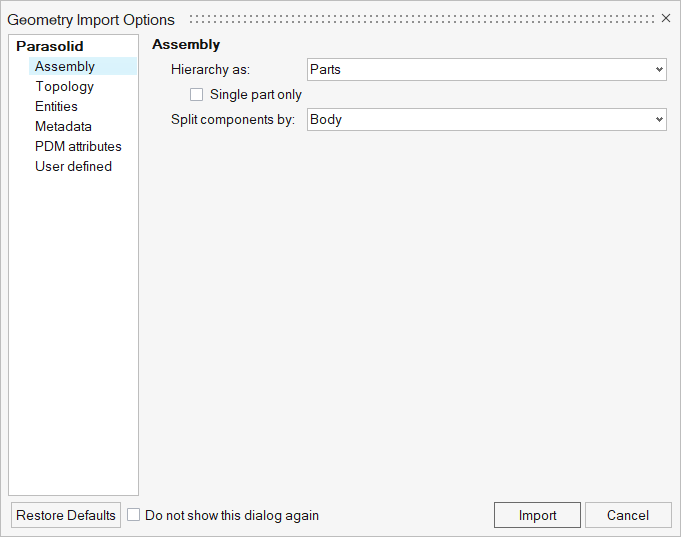
Figure 4.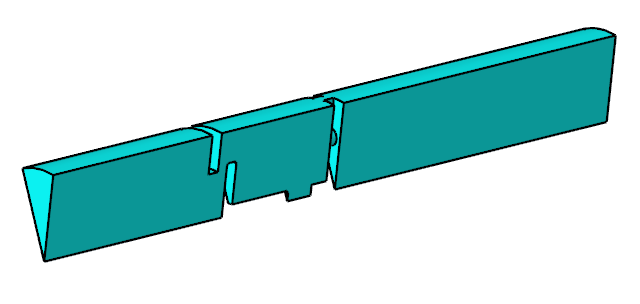
Figure 5.
Validate the Geometry
-
From the Geometry ribbon, click the Validate tool.

Figure 6.The Validate tool scans through the entire model, performs checks on the surfaces and solids, and flags any defects in the geometry, such as free edges, closed shells, intersections, duplicates, and slivers.The current model doesn’t have any of the issues mentioned above. Alternatively, if any issues are found, they are indicated by the number in the brackets adjacent to the tool name.
Observe that a blue check mark appears on the top-left corner of the Validate icon. This indicates that the tool found no issues with the geometry model.
Figure 7.
Set Up Flow
Set Up the Simulation Parameters and Solver Settings
-
From the Flow ribbon, click the Physics tool.

Figure 8.The Setup dialog opens. -
Under the Physics models setting:
- Set Time marching to Transient.
- Set the Time step size to 0.002 and the Final time to 0.35.
- Select Spalart-Allmaras as the Turbulence model.
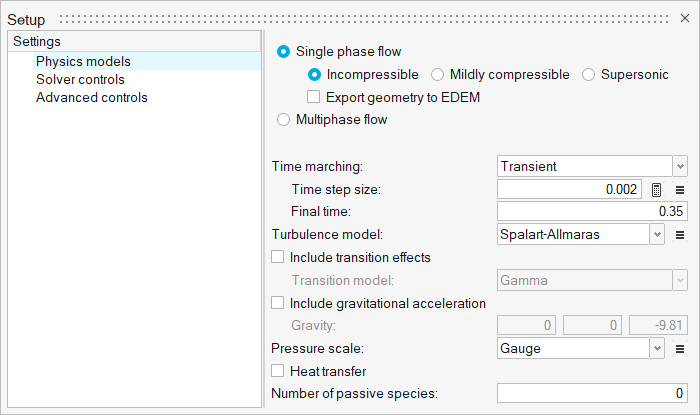
Figure 9. -
Click the Solver controls setting and set the Maximum
stagger iterations to 3.
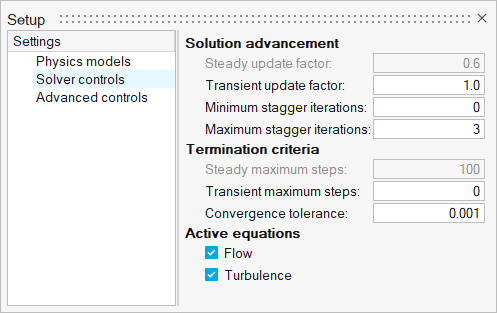 Figure 10.
Figure 10.
Create a Multiplier Function for the Inlet Pressure
-
From the Flow ribbon, click the arrow next to the
Setup tool set, then select Multipliers.
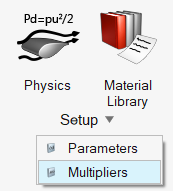
Figure 11. -
Click
 in the
Multiplier Library dialog.
in the
Multiplier Library dialog.
-
Click
 four
times to add four rows to the bottom of the table.
four
times to add four rows to the bottom of the table.
-
Enter the table values according to the image below.
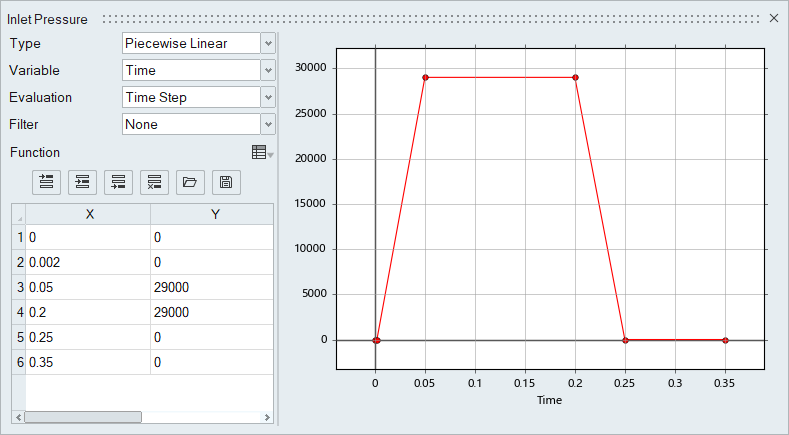
Figure 12.
Assign Material Properties
-
From the Flow ribbon, click the Material tool.

Figure 13. -
Click anywhere on the pipe geometry.
The entire geometry is highlighted.
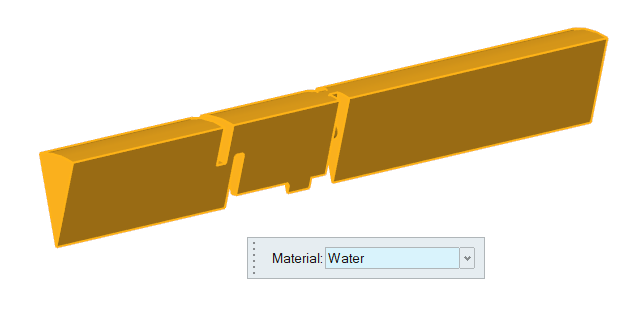
Figure 14. -
On the guide bar, click
 to execute
the command and exit the tool.
to execute
the command and exit the tool.
Define Flow Boundary Conditions
-
From the Flow ribbon, Pressure
tool group, click the Stagnation Pressure tool.

Figure 15. -
Click the Multiplier function drop-down and select the function
Inlet Pressure from the list.
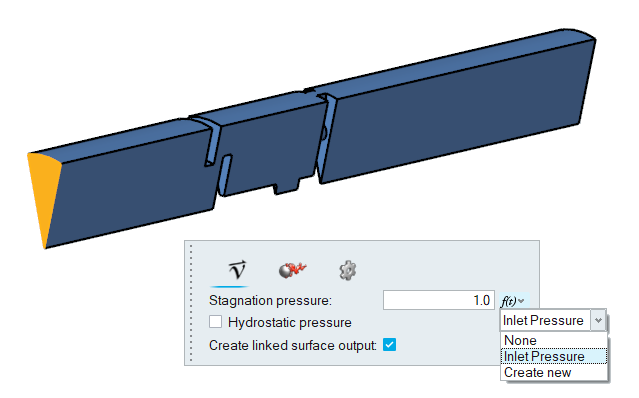
Figure 16. -
Click the Turbulence icon the microdialog, set the
Turbulence input type to Viscosity Ratio, and the enter a
value of 10 for the Turbulence viscosity ratio.
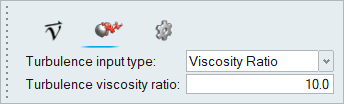
Figure 17. -
On the guide bar, click
 to execute the command and remain in the
tool.
to execute the command and remain in the
tool.
-
Click the Outlet tool.

Figure 18. -
Click the outlet surface shown in the figure below.
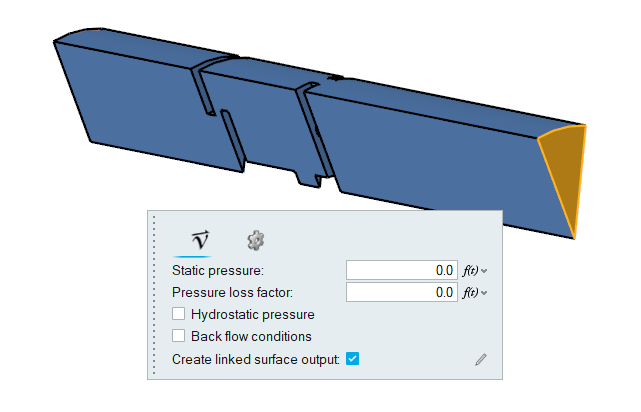
Figure 19. -
On the guide bar, click
to execute
the command and exit the tool.
-
Click the Symmetry tool.

Figure 20. -
Select the two surfaces shown in the figure below.
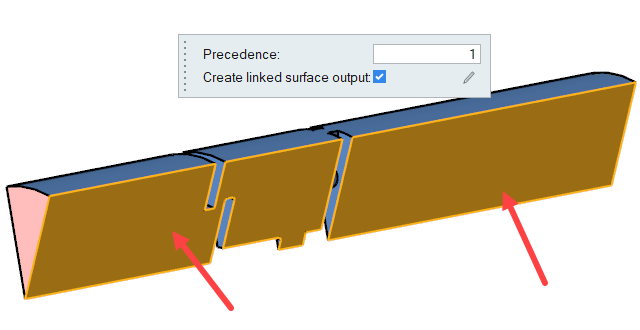
Figure 21. -
On the guide bar, click
to execute the command and remain in the
tool.
-
Rotate the model and select the other two symmetry faces.
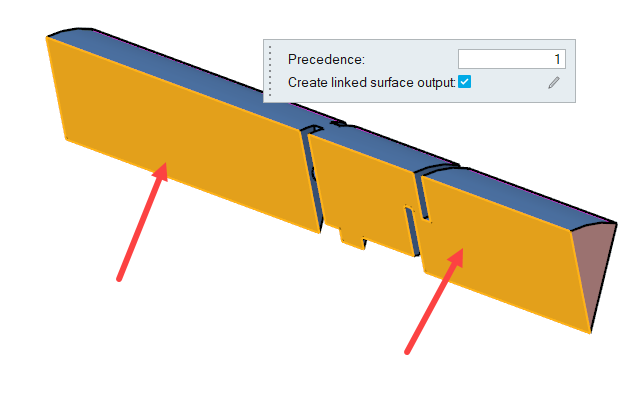
Figure 22. -
On the guide bar, click
to execute the command and remain in the
tool.
Set Up Motion
In this step, you will activate the mesh motion and define the rigid body motion for the valve wall. Then, you will define the mesh displacement boundary conditions for the symmetry surfaces.
Define the Mesh Motion Type
-
From the Motion ribbon, click the Settings tool.
Figure 23. -
In the Setup dialog, change the Mesh motion to
Arbitrary.
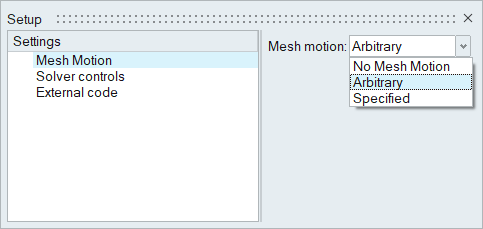
Figure 24. -
Set the Socket port to 48000.
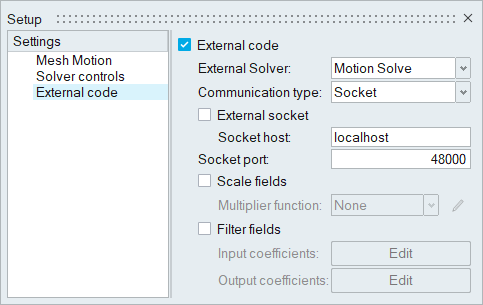
Figure 25.
Define the Mesh Displacement Boundary Conditions
-
From the Motion ribbon, click the Planar Slip tool.

Figure 26. -
In the Mesh Motion legend, rename Planar Slip to
Front_symmetry by double-clicking on the name.
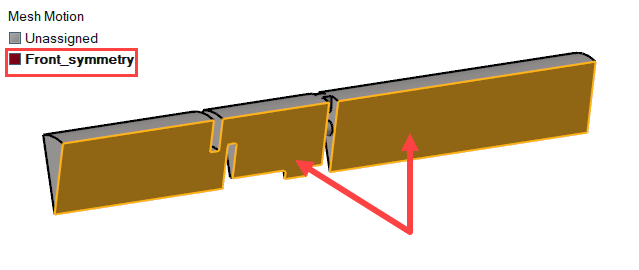
Figure 27. -
On the guide bar, click
to execute the command and remain in the
tool.
-
On the guide bar, click
to execute
the command and exit the tool.
-
Click the External Surface tool.

Figure 28. -
Zoom in on the valve region and select all the valve wall surfaces using the
window selection method.
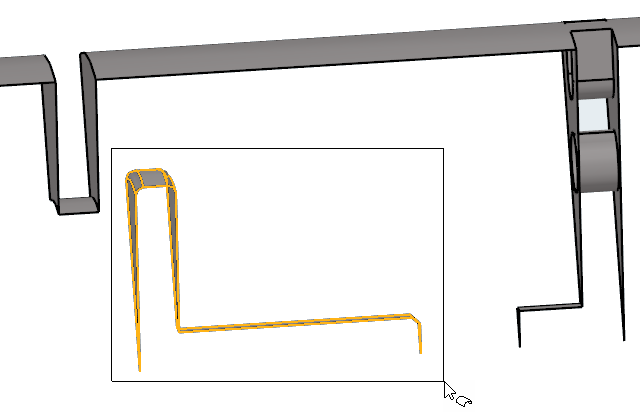
Figure 29. -
In the microdialog, set the Coupling direction to
Both and enter Model-Shutter
Body as the name of the Rigid body.
Note: The name of the rigid body specified here should match the name of the rigid body in the MotionSolve model.
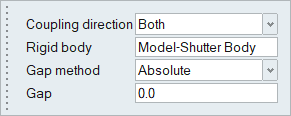
Figure 30. -
On the guide bar, click
to execute
the command and exit the tool.
Generate the Mesh
In this step, you will define the mesh controls and then generate the mesh.
Define the Zone Mesh Controls
-
From the Mesh ribbon, Zones
tool group, click the Cylinder
tool.

Figure 31. -
In the modeling window, hover the mouse around the
point shown in the figure below. When the preview cylinder zone is parallel to
the axis of the pipe, click on the model near the point shown below.
This point will be the center of the front face of the cylinder. In the next few steps you will edit the co-ordinates of this point manually.
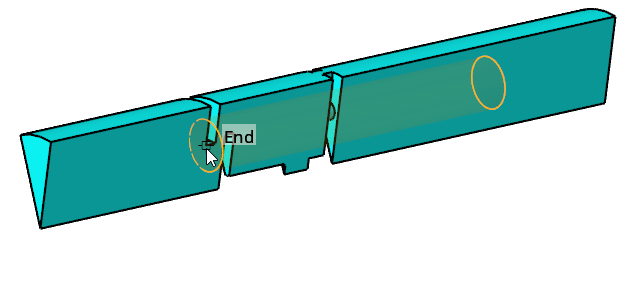
Figure 32. -
Move the mouse cursor away from the center and then click again.
A preview of the zone should be displayed on the screen along with the manipulator. The manipulator allows you to modify the location and orientation of the zone.
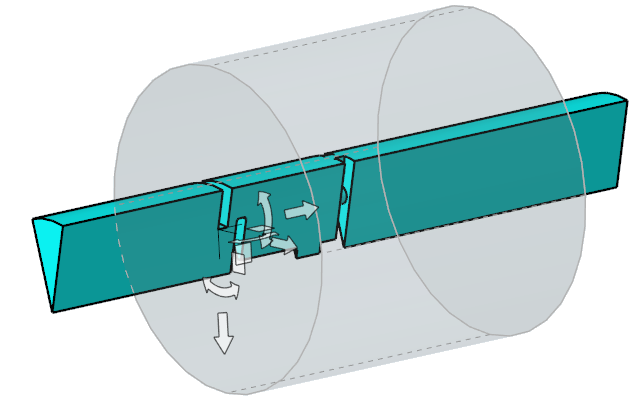
Figure 33. -
Click the center of the manipulator and enter the following coordinates for the
center (-0.06, 0.02, 0)
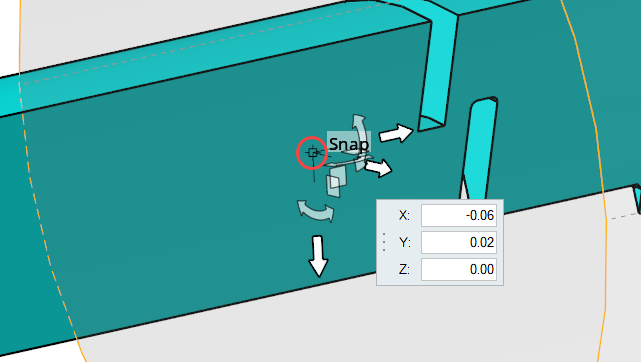
Figure 34. -
Double-click on the cylindrical surface of the zone and enter
0.022 m as the radius of the cylinder.
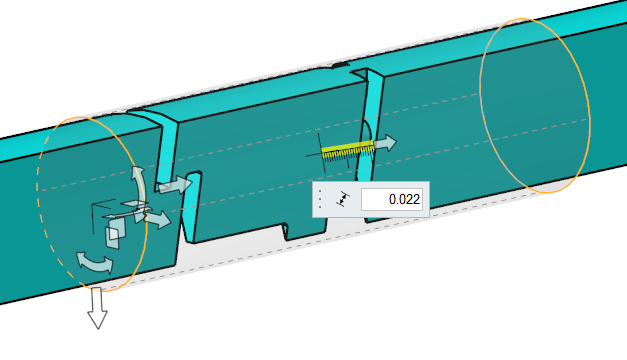
Figure 35. -
Double-click on the base of the cylinder and enter 0.1 m
as the height of the cylinder.
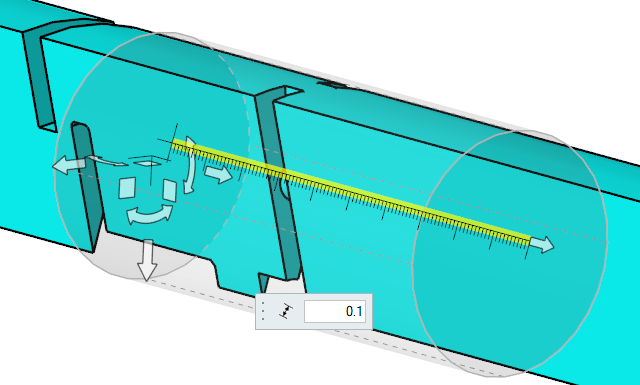
Figure 36. -
In the Refinement zones legend, rename the zone to Valve region mesh
refinement.
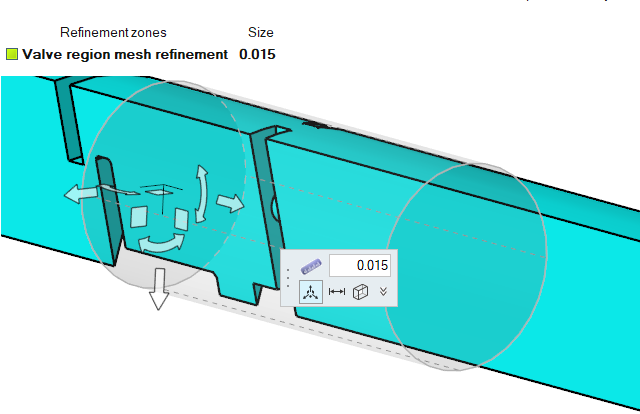
Figure 37.
Define the Boundary Layer Controls
-
From the Mesh ribbon, click the Boundary Layer tool.

Figure 38. -
Enter the following values in the dialog:
- First layer thickness: 0.00035
- Total number of layers: 3
- Growth method: Constant
- Initial growth rate: 1.2
- Termination policy: Truncate
- Activate Enable surface mesh modification.
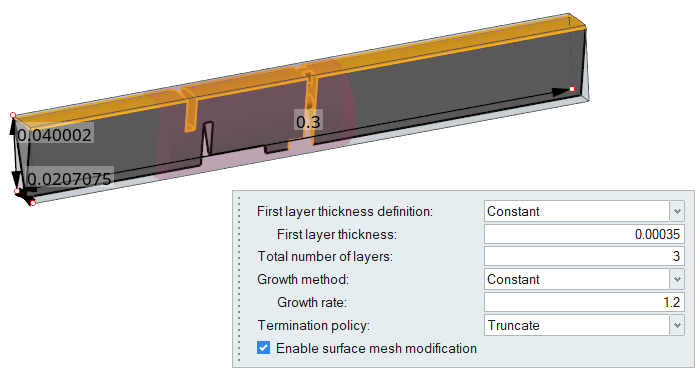
Figure 39. -
On the guide bar, click
to execute the command and remain in the
tool.
-
In the dialog that appears, enter the following values for the BL
specification:
- First layer thickness: 0.00015
- Total number of layers: 3
- Growth method: Constant
- Initial growth rate: 1.2
- Termination policy: Truncate
- Activate Enable surface mesh modification.
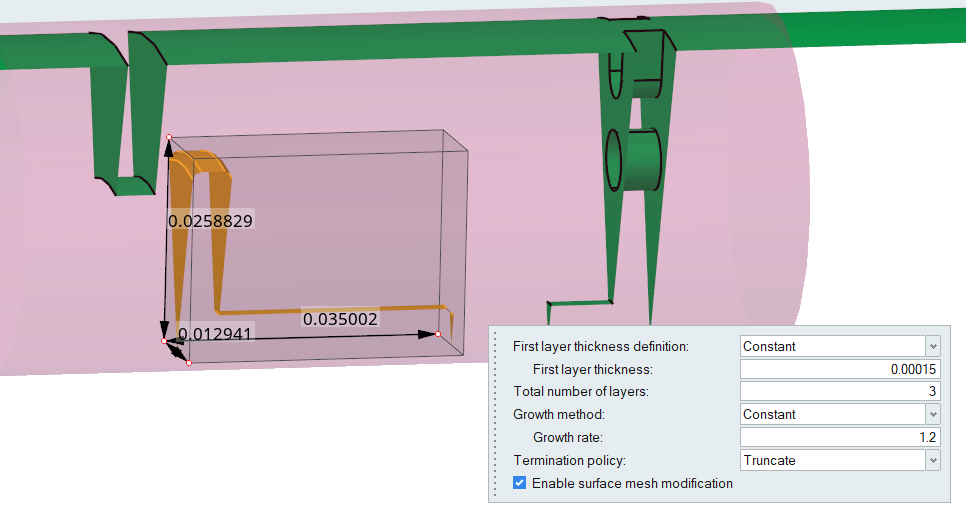
Figure 40. -
On the guide bar, click
to execute
the command and exit the tool.
-
Click the drop-down next to the Mesh Controls tool set and select Advanced.
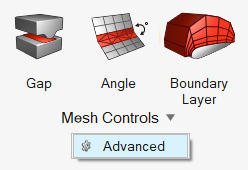
Figure 41. -
In the Advanced mesh settings dialog, change the Boundary
layer element type to Tetra then close the dialog.
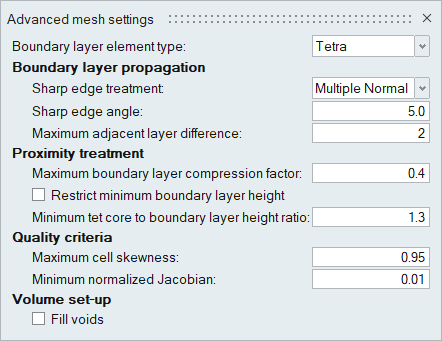
Figure 42.
Generate the Mesh
-
From the Mesh ribbon, click the
Volume tool.

Figure 43. -
Click Mesh to generate the mesh.
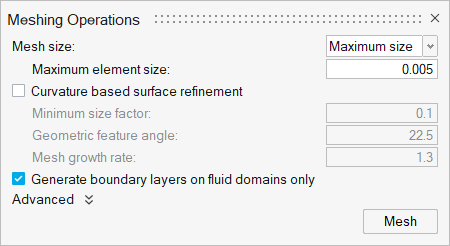
Figure 44.Once the meshing process has started, the Run Status dialog appears and the application moves to the Solution ribbon.
Compute the Solution
Define Nodal Outputs
-
From the Solution ribbon, click the Field tool.

Figure 45. -
In the Field Outputs dialog, set the Time step interval to
1 for the Solution variables.
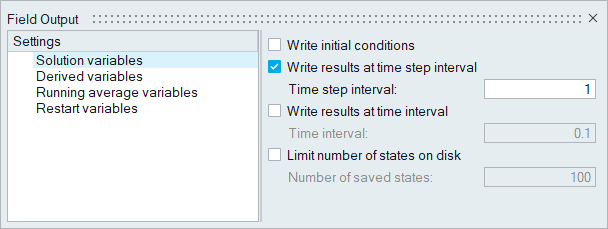
Figure 46.
Run AcuSolve
-
From the Solution ribbon, click the Run tool.

Figure 47. -
Leave the remaining options as default and click
Run to launch AcuSolve.
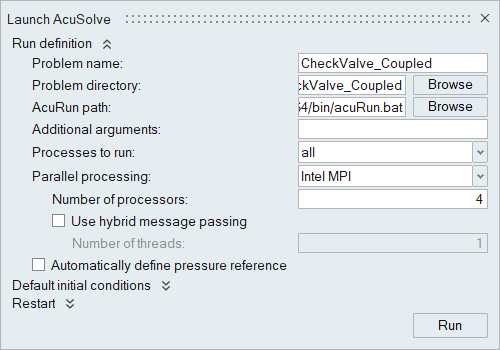
Figure 48.The Run Status dialog opens. Once the run is complete, the status is updated and you can close the dialog.
Run MotionSolve
-
Select from the menu bar.
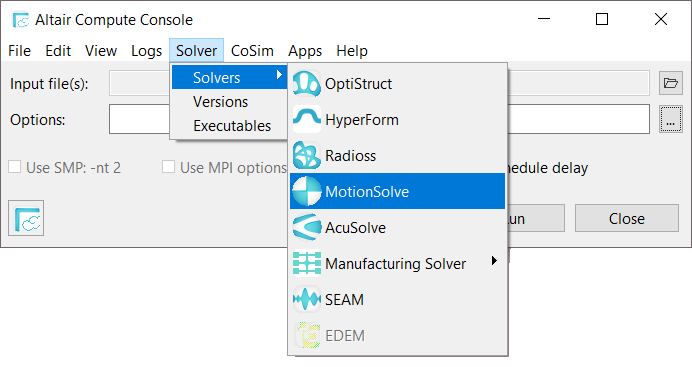
Figure 49. -
Click
 besides the Input file(s) field, browse to the
location where you saved Valve_model.xml, and open it
besides the Input file(s) field, browse to the
location where you saved Valve_model.xml, and open it
-
For Options, type -as_cosim to indicate coupling between
MotionSolve and HyperWorks CFD.
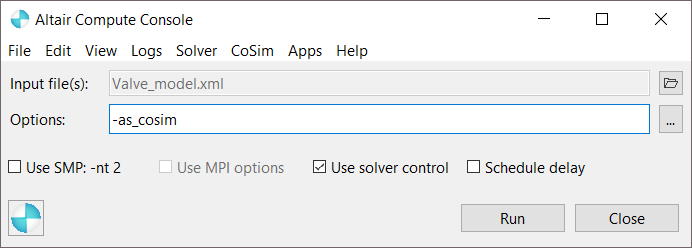
Figure 50.
Monitor the Results
-
From the Solution ribbon, click the Plot tool.

Figure 51. -
Click next to the Library tab.
-
Keep the X-axis set to Step. For the Y-axis, click the
tree browser
 and select
mesh_displacement under Surface Output.
mesh_x_displacement is selected by default for the coordinate direction.
and select
mesh_displacement under Surface Output.
mesh_x_displacement is selected by default for the coordinate direction. -
Check the box for Inlet - Output under Selector.
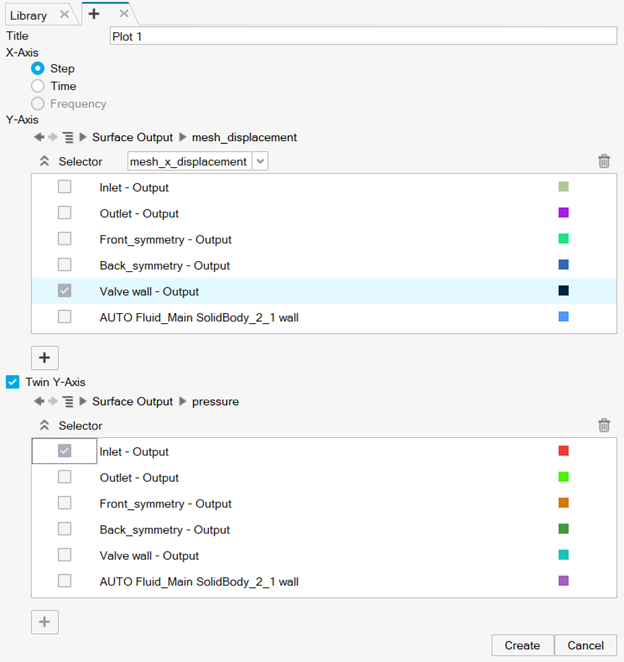
Figure 52. -
Click Create.
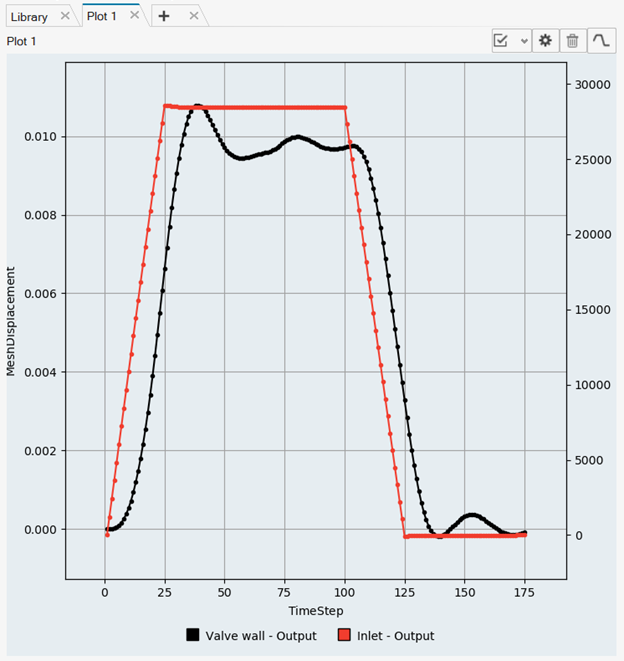
Figure 53.Note: The valve motion lags behind the pressure changes at the inlet. Note also the spike around the 37th time step. This represents the collision of the valve stem with the stop and the subsequent rebound of the valve.
Post-Process the Results with HW-CFD Post
Create an Animation of Velocity Magnitude
-
Click the Top face on the View Cube to align the
model.
Figure 54. -
Click
 and set the Colormap Name to Rainbow
Uniform.
and set the Colormap Name to Rainbow
Uniform.
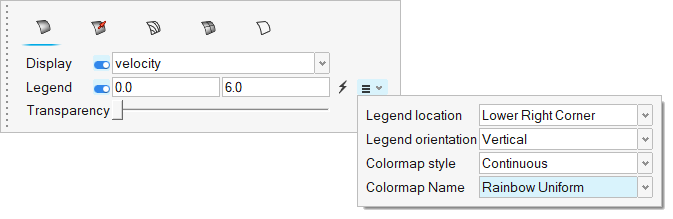
Figure 55. -
Click
 on the guide bar.
on the guide bar.
-
Click
 at the bottom of the modeling window to view a live animation of the flow.
at the bottom of the modeling window to view a live animation of the flow.
Figure 56. -
Save the animation.
- Go to .
-
Click
 on the toolbar.
on the toolbar.
- Uncheck Include mouse cursor.
- Set the frame rate to 50.
-
Click
 on the toolbar then drag over the area you
want to record.
on the toolbar then drag over the area you
want to record.
-
Click
 to start recording and the same button to
stop recording.
to start recording and the same button to
stop recording.
- Name the file and save it.
Display Pressure Contours and Velocity Vectors on a Section Cut
-
Click the Slice Planes tool.

Figure 57. -
Make sure the View Cube is aligned with the Top face.
Figure 58. -
Click
 in the slice plane microdialog.
in the slice plane microdialog.
-
Turn off the Display in the Contour tab of the display
properties microdialog.
Figure 59. -
Activate the Legend toggle and click
 to reset the range.
to reset the range.
-
Click , set the Legend location to Upper
Center, the Legend orientation to
Horizontal, and the Colormap Name to
Rainbow Uniform.
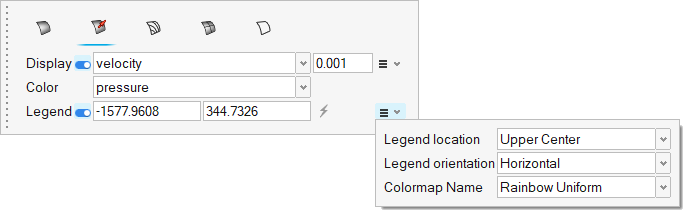
Figure 60. -
Click on the guide bar.
-
In the Post Browser, right-click on Slice Plane
1 and select Isolate.
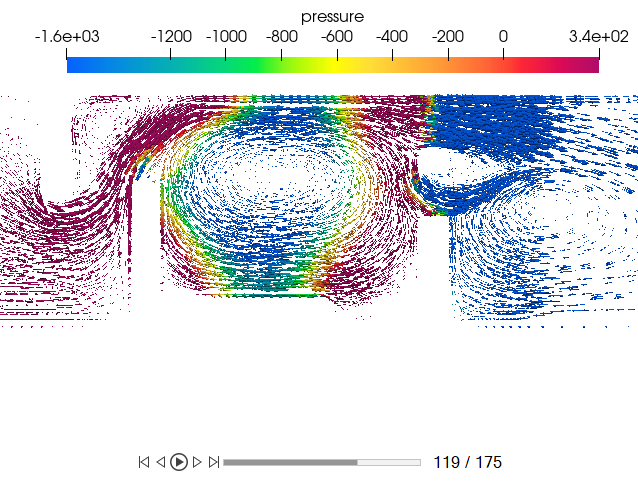
Figure 61.
Summary
In this tutorial, you learned the basic workflow to set up a co-simulation using AcuSolve and MotionSolve. The tutorial introduced you to the steps involved in setting up external code communication between AcuSolve and MotionSolve using HyperWorks CFD, and then running the simulation and post-process the results using HyperWorks CFD Post. You also learned how to create a vector plot on an existing contour plot on a cut plane.