Linear Gap
Linear gap is the simplest contact form used in Nastran simulations.
Linear gap can solve a large class of problems, such as hole bearing, heel-toe interaction and fitting contacts. Linear does not include friction, large displacements and material non-linearity. CGAP contact elements (node-to-node defined in the FEM environment) run in both linear static (SOL101) and non-linear analysis (SOL106).
- Displacement criteria: no penetration (MPC displacement > =0)
- MPCFORCE criteria: compressive force only (MPC force < =0)
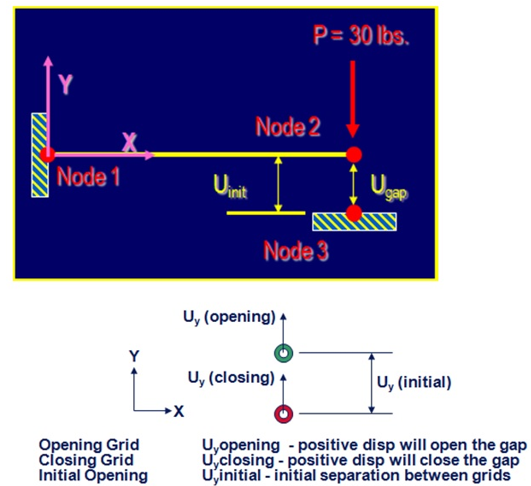
Figure 1.
The equation for the gap displacement can be written as:
Uygap = Uyopening – Uyclosing + Uyinitial
Rearranging in MPC format and setting Uyclosing as the dependent (first) term:
Uyclosing – Uyopening + Uygap – Uyinitial = 0
The Nastran commands to use for linear gaps are the following:
SPOINT (scalar point definition) is used to define the Ugap and Uinit :
SPOINT 55 155
The SUPORT entry specifies reference degrees-of-freedom for rigid body motion, and it puts SPOINT 55 (Ugap) in the R-set for iteration:
SUPORT 55 0
SPC selects a single-point constraint set to be applied and defines the initial gap opening = .05 (Uinit):
SPC 101106 155 0 .05
MPC entry: (equations of motion: Uy3 – Uy2 + Ugap – Uinit = 0)
$ SID G1 C1 A1 G2 C2 A2
MPC 101106 3 2 1.0 2 2 -1.0
$ G3 C3 A3 G4 C4 A4
55 0 1.0 155 0 -1.0
- PARAM, CDITER (integer) maximum number of iterations to determine open/closed
- PARAM, CDPRT (yes/no) print iteration history of constraint violations
- PARAM, CDPCH (yes/no) punches DMIG, CDSHUT entries for final solutions
- DMIG, CDSHUT: input vector of initial open/closed state of gaps (default = all closed)
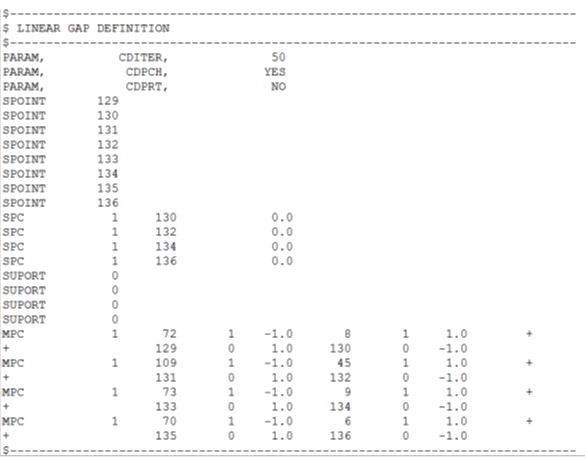
Figure 2.