OS-E:4015 システムレベルのMBD応答最適化
システムレベルのMBD応答としては、変位、速度、加速度、荷重、またはそれら4つの応答を用いて予め定義された関数が考えられます。システムレベルのMBD応答は、MBDシステム内の弾性体の他の構造応答とともに最適化 / 制約することが可能です。
モデルファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
この例で使用されているモデルファイルには以下のものが含まれます:
mbdsystemlvlopt.fem
モデル概要
ここに示す例は、システムの質量の最適化を目的にしています。制約条件は、弾性体の応力とポイントの速度に課されます。着目すべき点には下記が含まれます。
システムレベルの応答
システムレベルの応答が最適化プロセスに使用可能になるには、MBDソルバーが適切な出力を生成できるよう、MBREQEまたはMBREQMエントリが定義されていなくてはなりません。
$------|--MID--|--GID--|
MARKER 55 9929617
$------|--RSID-|--RID--|--ITEM-|--MID--|
MBREQM 99 999 VEL 55RID(ここでは999)は、DRESP1で参照されなければなりません。
$------|-------|-------|-------|-------|-------|-------|-------|-------|
DRESP1 3 VELO MBVEL MBREQM TX MIN 999リクエストされた応答が最適化に使用可能にするために、サブケース内でMBREQM/Eで定義されたリクエストを参照する必要はありません。MBREQMのRSID(ここでは99)は、任意の正の整数です。
ジョイント位置を含んだDVGRID
ボディの長さの変更は、希望するシステムレベルの応答を得るための一般的な方法です。形状最適化におけるこの変更は、DVGRIDを使って行うことが可能です。その場合、ボディの長さを変更する際、ジョイントが有効な設定に留まることを確実にしなくてはならないため、DVGRIDの定義には注意が必要です。

図 1. ジョイントの位置の変更を含む形状変更を定義する際に起こしがちな誤り
図 1. ジョイントの位置の変更を含む形状変更を定義する際に起こしがちな誤り
図 1では、形状摂動を適用した後も、節点Aと節点Bは同一座標上に留まる必要があります。
形状摂動ベクトルの適用後の正しいコンフィギュレーションは、次のようでなければなりません:

図 2. ジョイントの位置の変更を含む形状変更定義の正しい方法
図 2. ジョイントの位置の変更を含む形状変更定義の正しい方法
結果
最適化の結果は、図 3のようになるはずです。
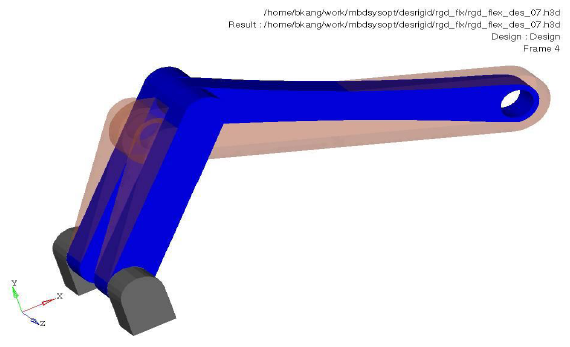
図 3. 不透明なオレンジ: ベースラインモデル; 青色: 最適化されたモデル
図 3. 不透明なオレンジ: ベースラインモデル; 青色: 最適化されたモデル