座標系: 概要
使用の基本
座標系は、デバイスパートの形状の記述と動きを簡素化するために使用されます。
座標系のタイプ
Flux PEECの座標系のタイプと関連する座標を以下に示します。
|
3D直交座標系 座標(x、y、z) |
3D円筒座標系 座標(r、θ、z) |
3D球座標系 座標(r、θ、φ) |
|---|---|---|
 |
 |
 |
参照座標系
次の座標系に分類することができます。
- 全体座標系が、計算が実行される座標系です。ユーザーがこれにアクセスすることはできません。全体座標系は、長さ単位としてm、角度単位として度を使用するユニバーサル直交座標系です。
- 作業座標系は、スタディでのニーズを満たすようにユーザーが作成する座標系です。
作業座標系は次のように定義されます:
- 全体座標系を参照する場合は、全体座標系を基準に
- その他の座標系を参照する場合は、局所座標系を基準に
すべてのエンティティが、作業座標系(ユーザーの座標系)で定義され、計算時には全体座標系で評価されます。
例
下の図に示されているデバイスを記述するには、2つの形状座標系が使用されます。
- 接地面CART_PLANの記述用の座標系:
タイプ:直交
参照座標系:全体
固有の特性:- 長さ単位: mm
- 角度単位: 度
位置:- 中心:0、0、0
- 回転:0、0、0
- 導体CART_CONDの記述用の座標系:
タイプ:直交
参照座標系:局所
固有の特性:- 親座標系:CART_ PLAN
位置:
- 中心:3、15、5
- 回転:-30、0、0

参照座標系での座標系の配置
座標系は、以下を使用して参照座標系で配置されます:
- 参照座標系での座標系の中心座標
- 参照座標系の軸を中心とした、この座標系の軸の回転角
警告: Flux PEECは、次々と回転を実行します。つまり、最初にX軸の周りに回転させ、次に生じたY軸の周りに回転させ、最後に生じたZ軸の周りに回転させます。
あいにく座標系がこの方法で定義されていない場合(アクションが異なる順序で実行された場合、または回転軸が常に全体座標系を基準に考慮されている場合)、回転を再分解する必要があります。
配置の例
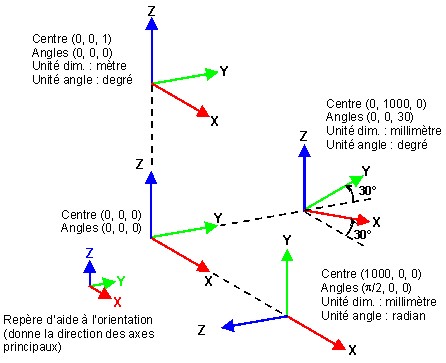
座標系の単位
ユーザーは、全体座標系を基準に定義される座標系の長さと角度の単位を定義できます。
局所座標系を基準に定義される座標系は、参照座標系(親座標系)の単位を継承します。
パラメータ設定
座標系の原点、および軸を中心とした回転角を、代数式を使用して定義できます。
この代数式には、以下を含めることができます:
- 定数
- 形状パラメータ(事前に作成されたもの)
- 次の演算子を使用した基本数学関数:+、-、*、/、( )
- FORTRANで使用できる標準数学関数
数学関数については、関数の項をご参照ください。