最適化問題のセットアップ
トポロジーの最適化中に、設計領域でDRESP1を通して応力制約条件を使用することはできますか?
トポロジー最適化について、設計領域でDRESP1を使って局所的な応力制約条件を定義することは可能です。応力の応答を集約するには、Stress NORMメソッドが使用されます。
質量 / 体積制約条件がある場合に、トポロジーの最適化中にグローバル応力制約条件を使用することはできますか?
質量 / 体積制約条件と共にグローバル応力制約条件を使用することは推奨されません。制約条件が設定された質量 / 体積により、応力制約条件が満たされない可能性があります。
グローバル応力制約条件を使用したトポロジー最適化の実行後に応力ターゲットに違反する領域がモデル内にあるのはなぜですか?
トポロジー最適化の応力制約条件定義はグローバル制約条件であり、局所的な応力集中をターゲットとしていません。このような箇所は、寸法、形状、またはフリー形状の最適化あるいはそれらの組み合わせにより対処できます。不自然な応力集中は、応力制約条件を使用するトポロジー最適化でフィルタにかけられます。これには、剛体結合周辺の領域、コーナー部などの急激な幾何学形状変化による集中などがあります。
グローバル応力制約条件を使用するトポロジー最適化で意味のある結果が得られない場合があるのはなぜですか?
設計スペースと非設計スペース間で応答値に大きな差があるモデルでは、応力制約条件が適切に機能しない場合があります。このような場合は問題の定式化を、例えばコンプライアンスベースに変更することが推奨されます。
第1モード周波数を対象とした設計最適化時に問題が発生するのはなぜですか?
- 計算が最大反復数の上限に達し、収束しません。
- 最適化中に目的関数が何度も振動し、収束に時間がかかります。
第1モード周波数をターゲットにする際には、第1モードだけでなく、最初の数モード(例えば1~5)に制約条件を設定することが推奨されます。これにより、問題がより安定し、収束が改善します。同じことが座屈応答にも当てはまります。
4つの取り付け位置があるコンポーネントのトポロジー最適化の実行後に取り付け位置の1つに荷重経路が伸びない場合は何を意味していますか?
この原因は、その特定の非設計パート(取り付け位置)が最適な荷重伝達には必要ないためです。隣接パートへの結合がある場合は、いくらかの荷重は存在するはずです。荷重により、その領域が設計スペースから切り離されないことが保証されます。
航空宇宙用コンポーネントのカットアウトおよび板厚はどのように最適化できますか?
まずトポロジー最適化によりカットアウトを最適化してから、続いてフリー寸法最適化により板厚を最適化することが推奨されます。
座屈応答を使用したフリー寸法最適化の実行に関する推奨事項はありますか?
座屈応答を使用したフリー寸法最適化の実行時には、ベース板厚値の使用が推奨されます。最適化プロセスでは、設計で多数の座屈モードによる同時破壊が発生する傾向があります。最大で設計変数の数だけ発生する可能性があります。これは、適切なベース板厚を選択することによってのみ規制できます。このようにすることによって、局所的座屈モードが多数形成されることを防止できる場合があります。
フリー寸法最適化中に負のヤコビアンを持つ要素による実行の中断を防ぐにはどうすれば良いですか?
- エッジを含むソリッドフェイス上のフリー形状変数の定義時には、すべてのグリッドを含む1つの変数ではなく、2つの変数を作成することが推奨されます。定義する2つの変数には、エッジの両側の2つのサーフェスがそれぞれ含まれます。エッジに沿った節点は、2つの変数間で共有できます。
- 最適化を開始する前にメッシュ品質を向上させます。
- フリー寸法定義のNSMOOTH値を増やします。
- 設計スペース制限を変更します。
- ‘精度重視で最適化’のスムージング手法を使用します。
音響応答を考慮しているときにパネル上でのトポグラフィー最適化の実行に関する制限事項はありますか?このパネルには流体ドメインとのインターフェースが存在します。
音響解析では、インターフェースマトリックスは流体および構造グリッド間で計算されます。流体および構造グリッド間のこのインターフェースは‘濡れ’面と呼ばれています。計算の精度を決定する際には、このインターフェースの計算の精度が重要です。最適化の実行中には、最適化の開始時に計算された元のインターフェースが最適化を通して使用され、最適化の実行中に更新されることはありません。最適化中にインターフェースが影響を受けなければ(例えば、流体ドメインから離れた場所でコンポーネントを最適化する)、最適化は実行できます。ただし最適化中に、例えばトポロジー、トポグラフィーまたは形状によりインターフェースが十分に変わることが予想される場合、最適化ソリューションは正確ではない可能性があります。これは、バージョン10.0以降の実装に基づいています。
一般的に使用されている / 推奨されているトポロジー最適化問題の定式化はありますか?
- コンプライアンスの最小化(重み付き / 合計 / 局所的)と制約された(合計 / 局所的)体積 / 質量比
- 体積 / 質量比の最小化(合計 / 局所的)と制約された変位
- 周波数の最大化(重み付き)と制約された(合計 / 局所的)体積 / 質量比
トポロジー最適化用のメッシュサイズに関する要件はありますか?
トポロジー最適化に使用される密度法はメッシュに依存しています。またチェッカーボード状態(要素間で密度値が急激に変化する)が発生します。2次要素を含むモデルではこの挙動は発生せず、最小部材寸法制約条件を使用することにより、このチェッカーボードの問題に対処できます。
volumefrac応答と体積応答との違いは何ですか?
volumefrac応答は、設計可能な材料体積の材料比です。体積応答は合計体積であり、設計体積と非設計体積の両方を含みます。
OptiStructでは、質量の最小化は体積の最小化と同じですか?
同じ密度rが使用されている限り、どちらの定式化も同じです。体積の最小化時には、材料カードの密度値を指定する必要はありません。
設計スペースと非設計スペースで異なる密度rが存在する場合、質量の最小化と体積の最小化で最適化結果が異なることがあります。
設計質量と非設計質量がほぼ同じで、設計体積が非設計体積よりもはるかに小さい場合(Vdesign << Vnon-design)は、質量を最小化した方が良い結果が得られます。
一方、設計体積と非設計体積がほぼ同じで、設計質量が非設計質量よりもはるかに小さい場合(rdesign << rnon-design)は、体積を最小化した方が良い結果が得られます。
最適化のステップサイズを制御する方法はありますか?
1回目の反復のムーブリミット(各反復ステップで可能な設計変数の変更)を変更できます。ムーブリミットは各最適化タイプに対して異なる方法で定義されます。パラメータは、DOPTPRMステートメント状のDELTOP、DELSHP、DELSIZです。DESVARカード上でサイズおよび形状変数に対して定義することもできます。
HyperMeshでは、AnalysisページのOptimizationパネルにあるOpti Controlサブパネルを使用します。
OptiStructジョブはどのような手順でリスタートしますか?
OptiStructジョブをリスタートするには、filename.fem(入力データを含む)とfilename.sh(最後に完了した反復からの設計変数情報を含む)の2つのファイルが必要です。
ドキュメントのOptiStructの実行セクションのリスタートの要件をご参照ください。
トポロジー最適化を使用してシェルモデルのリブパターンを取得することは可能ですか?
はい、ただしこれを行うには、トポロジー最適化問題を異なる方法で定義する必要があります。
シェル要素の板厚全体を設計可能として定義するのではなく、コア板厚と設計可能な領域(リブを生成可能)を含む最大板厚Tに加え、コア非設計板厚T0を指定する必要があります。その後、通常どおりトポロジー最適化を実行できます。
-coreに設計可能な板厚を加えた高さのリブが必要になります。密度値が0.0になる箇所ではリブは不要であり、コア板厚のみが維持されます。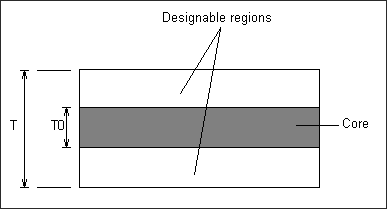
図 1.
コンコンポーネントの最小コア板厚: 1.5 mmリブを含む最大板厚: 3.5 mm
PSHELLカードで板厚は3.5 mmに設定され、DTPLカードでT0は1.5に設定されます。
サブケース(荷重ケース)内のモード重みはどのようにして割り当ておよび / または変更できますか?
モード重みは、モデル解析サブケース内からMODEWEIGHTサブケース情報エントリを使用して割り当てます。
HyperMeshパネル内で、Optimization panelとresponsesサブパネルにアクセスします。“応答タイプ”としてwfreqまたはcombが選択されている場合、最大6つのモード重みを6つのモードにそれぞれ割り当てることができます。
結合されたコンプライアンスと周波数の最適化問題に対するNORM係数はどのように計算できますか?
サブケース情報エントリNORMの値が0.0(デフォルト)のままの場合、正規化係数は最適化実行の0回目(解析のみ)の反復中に推定されます(静的コンプライアンスと重み付き周波数が同様に重み付けされるように)。0.0以外の値を指定すると、その値が最適化で使用されます。HyperMeshでは、“応答タイプ”がcombの場合、NORMの値はResponseパネルで定義できます。
正規化係数(NORM)は、結合されたコンプライアンスインデックスを目的関数として使用している場合に、静的荷重ケースコンプライアンスおよび固有値の逆数の寄与を正規化するために使用されます。典型的な構造コンプライアンス値は、およそ1.e4から1.e6になります。ただし、結合されたコンプライアンスインデックスを目的関数として使用している場合などの典型的な固有値の逆数は、およそ1.e-5になります。NFが使用されない場合、線形静解析のコンプライアンスの要件が解に対して支配的になります。“結合されたコンプライアンスインデックス”およびNORM値の使用方法の詳細については、ユーザーズガイドの応答をご参照ください。
設計可能な体積に対する制約条件の指定と設計可能な体積の最小化との違いは何ですか?
前者では、OptiStructに設計体積の特定の比率のみを使用するように指示する(つまり体積に制約条件を設定する)ことが可能です。OptiStructにより、目的関数を最適化し、指定されているその他の制約条件を満たしながら、設計領域内の材料の量が再分配および再方向付けされます。
後者では、体積を最小化する目的関数を選択できます。ここでは、OptiStructはその他の制約条件を満たす最終的なトポロジーに達するように体積を最小化します。
荷重の使用と強制変位との違いは何ですか?
剛性を増やすには、荷重ではコンプライアンスの最小化、強制変位ではコンプライアンスの最大化を使用する必要があります。
コンプライアンスは以下のように定義されます:
コンプライアンス ~ 荷重 · 変位
強制変位を使用している場合、剛性を増やすには反力を増やす必要があります。つまり、コンプライアンスを最大化しなければなりません。
荷重が指定されている場合、剛性の高い構造は変位が少ないことを意味します。この目標を達成するには、コンプライアンスを最小化する必要があります。
最適化実行の開始時(反復0)での材料比の初期値は何ですか?
設計問題の目的が体積応答または質量応答の最小化である場合、初期材料比はデフォルトで0.9に設定されます。設計問題で質量または体積制約条件が使用されている場合、初期材料比は、制約条件で定義されている値に対応する値になります。目的または制約条件の定義に質量応答または体積応答が使用されていない場合、反復0では材料比はデフォルトで0.6になります。
反復0で材料比に1を割り当てるにはどうすれば良いですか?
DOPTPRMバルクデータエントリでMATINITパラメータを定義することにより、初期体積比を1.0(または0.0と1.0の間のその他の値)に割り当てることができます。これはHyperMeshインターフェースから、Optimization panel(Analysisページにある)のOpti Controlサブパネルで、MATINITパラメータの値を変更し、対応するチェックボックスを選択することにより行えます。
さまざまな最適化タイプ(寸法、形状、トポグラフィーなど)を組み合わせることは可能ですか?
はい、OptiStructではどのような最適化タイプの組み合わせでも実行できます。ただし、最初は異なるタイプの最適化は別々に実行することが推奨されます。これにより、組み合わせた最適化を試みる前に、各最適化タイプの構造のパフォーマンスを理解することができます。
複数の最適化タイプを使用して最適化問題をセットアップするには、Optimization panelにアクセスし、実行する最適化タイプ(トポロジー、トポグラフィー、寸法または形状)に対応するサブパネルを選択します。Optimization panelで複数のサブパネルが選択されていると(トポロジーとトポグラフィーなど)、OptiStructは自動的に組み合わされた最適化を実行します。
さまざまな最適化タイプのセットアップの詳細については、ドキュメントのOptiStructチュートリアルをご参照ください。
トポロジー最適化の反復0の結果が、ANALYSISでの実行の結果と異なります。何が問題ですか?
問題はありません。トポロジー最適化に対して設計スペースを定義しています。解析のみの実行では、設計スペースの密度は1.0に設定されます。トポロジー最適化の1回目の反復では、DOPTPRMバルクデータエントリで定義するMATINIT値を1.0に明示的に設定していない限り、設計スペースの密度は1.0未満になります。したがって、1回目の反復の時点で、構造は解析のみの実行時ほど剛性が高くありません。
質量(体積)を目的としたトポロジー最適化ランの場合、MATINITのデフォルト値は0.9です。制約条件が設定された質量(体積)による実行では、デフォルト値は制約条件の値にリセットされます。質量(体積)が目的関数ではなく、制約条件も設定されていない場合は、デフォルト値は0.6となります。
モーダルパラメータを1回目の最適化反復で使用される値に設定して解析のみの実行を行うには、ANALYSISコマンドを使用せず、MAXITER=0を設定してください。
OptiStructの実行中に反復履歴はどのようにして確認できますか?
OptiStructの実行中は、HyperGraph(またはHyperView)を使用して反復履歴ファイル.hgdataを開き、反復に対する目的関数、制約条件、および設計変数のプロットを作成できます。Edit CurvesパネルでApplyをクリックすることにより、ビューを定期的に更新できます。
トポロジー最適化またはフリー寸法最適化では応力の制約条件は使用できますか?
- Normベースアプローチ(トポロジーとフリー寸法最適化)
Normベースのアプローチは、トポロジーとフリー寸法の最適化の応力応答を処理するためのデフォルトの方法です。この方法は、DRESP1バルクデータエントリの対応する応力応答RTYPEが入力されるときに使用されます。
Response-NORMの集計は、モデル内の要素のグループについて応力応答を計算するために内部的に使用されます。ソリッド、シェル、バー応力、およびソリッドコーナー応力は、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェル応力についてのみサポートされます)。詳細については、NORMメソッドをご参照ください。
- 拡張ラグランジュ法(ALM)(トポロジー最適化のみ)
拡張ラグランジュ法(ALM)は、トポロジー最適化の応力応答を処理するための代替方法です。DRESP1バルクデータエントリを使用して局所応力応答を指定するときに、DOPTPRM,ALMTOSTR,1を使用してアクティブにすることができます。
ALMは、式 1に示す局所応力制約を使用してトポロジー最適化問題を効率的に解くための代替方法です。
(1) ここで、- トポロジー設計変数のベクトル
- 目的関数
- j番目の拘束
- 局所応力制約の数
- 制約の総数
(2)EQ 2 ここで、- 要素密度
- 要素フォンミーゼス応力
- 応力の上限
- ラグランジュ乗数推定値
- 2次ペナルティ係数
(4) ラグランジュ乗数推定値は、のように更新されます。
一般的に、局所応力制約の数 は、非常に大きくなります。式 1を直接解くと、計算時間が長くなります。目的関数に応力の制約条件を課すことによって、制約の総数を大幅に削減できます。その結果、最適化問題を効率的に解くことができます。
パラメータは、 、 、 、 、 、 のように設定されます。 は、最初に1.0に設定され、5回の反復ごとに1.3倍されます。上限は30.0です。このプロセスに基づいて、トポロジー最適化は1フェーズ以内に実行されます。注: このALMを除き、OptiStructは、通常、複数フェーズ戦略を使用してトポロジー最適化問題を解きます。デフォルトのStress-norm(P-norm)メソッドも、局所的な応力制約を伴うトポロジー最適化問題を効率的に解きます。ALM1は、このようなモデルに適した代替手段です。
- グローバルなフォンミーゼス応力応答(トポロジーとフリーサイズ最適化)トポロジー最適化およびフリー寸法最適化には、DTPLまたはDSIZEカードのSTRESS追加継続行で、フォンミーゼス応力の制約条件を定義することができます。この制約条件には、次のような幾つかの制限があります:
- 応力の制約条件は、1つのフォンミーゼス許容応力に限定されます。異なる許容応力を有する異なる材料が構造内に存在する場合、特異トポロジーの現象が発生します。特異トポロジーは、応力の制約条件の条件付き性質に関連した問題のことで、要素がなくなると、要素の応力制約条件は消失します。これは、設計領域全体で勾配ベースの最適化エンジンによっては通常得ることができない解をもつ多数の縮退問題が存在するという別の問題を生じます。
- 部分領域の削除によりすべての応力制約条件が削除される惧れがあり、これにより最適化問題が正しく設定されなくなるため、構造の部分領域についての応力の制約条件は許可されません。したがって、応力の制約条件は、アクティブである際は、設計領域と非設計領域の両方を含むモデル全体に適用され、応力制約条件の設定は、すべてのDSIZEおよびDTPLカードについて等しくなければなりません。
- 集中荷重および集中境界条件によって生じる人工的応力制約条件をフィルタにかけるために、ビルトインインテリジェンスが装備されています。境界形状に起因する応力集中も、局所的な形状の最適化でより効率的に改良されるよう、ある程度フィルタにかけられます。
- 応力の制約条件がアクティブである要素が多数あるために、.outファイル内の保持された制約条件の表に要素応力のレポートが示されません。モデルの応力の状態の反復計算履歴は、HyperViewまたはHyperMeshで確認できます。
- 応力の制約条件は、1次元要素には適用されません。
- モデル内に強制変位が存在する場合、応力の制約条件は使用されない場合があります。
座屈係数は、ベース板厚がゼロではない場合、シェルトポロジー最適化問題として制約されることが可能です。座屈係数の制約条件は、トポロジー最適化のその他のケースには適用できません。
現時点では、設計空間を構成しない要素の目的関数または制約条件として、次の応答が使用可能です。複合材の応力 複合材のひずみ 複合材の破壊基準 周波数応答応力 周波数応答ひずみ 周波数応答フォース
トポロジー最適化またはフリー寸法最適化では座屈の制約条件は使用できますか?
- 座屈制約条件は条件付きで、応力拘束に似ています(トポロジー最適化またはフリー寸法最適化では応力の制約条件は使用できますか?をご参照ください)。構造パートがなくなると、構造の不安定性は存在しなくなります。この結果、設計領域の密度が0に近づくと実行可能な設計領域が突然変化する、特異トポロジーの現象が発生します。勾配ベースの最適化アルゴリズムではこの制限は克服できません。例えば、構造の安定性はパネルの開口部周辺で最も重要な場合があります。最適化プロセスでは、開口部の形状を改良するために境界から材料を取り除くのではなく、境界に材料を付加して安定性を向上させようとする傾向があります。このため、より意味のあるトポロジーと形状を検出できなくなります。
- 低密度材料は構造剛性にはほとんど影響を及ぼしませんが、座屈の荷重限度に大きく影響することがあります。多くの場合、横方向の支持を多少付加することにより、構造の安定性が向上します。
- 消失する領域(低密度領域)の座屈モードは構造的完全性には影響しません。これらの座屈モードをどのように効果的にフィルタにかけるかは、座屈制約条件に関する課題の1つです。
上記の理由から現時点では、1つの設計問題クラス(非ゼロベースの板厚を持つシェル構造)でのみ妥当な成果が期待できます。
モデル内で剛体モードを確認する方法はありますか?
剛体モードを確認するには、OptiStructデックの入出力オプションまたはサブケース情報セクションに診断コマンドOSDIAG,46,1を追加します。この診断コマンドは制約条件が設定されているDOFを出力し、剛体モードの結果をユーザーに示します。
体積または質量をトポグラフィー最適化の応答として定義できますか?
体積の感度はトポグラフィー最適化では低すぎるため、最適化には大きく寄与しません。体積と質量はどちらも応答として使用しないことが推奨されます。
異なる荷重ステップからの同じ応答はどのようにして加算できますか?
これは、DEQATN、DRESP2、およびDRESP1Lカードを使用して行えます。複数の応答を合計するためにDEQATNが定義されます。このDEQATNはDRESP2定義で参照されます。これは、DRESP1L継続を使用して複数の異なるサブケースに対する同じDRESP1応答を選択します。
HyperMeshでは、これは、まずdequationを定義することにより行います。次にResponseパネルで、応答タイプとしてfunctionを選択し、定義済みのdequationを選択し、editをクリックし、使用可能なオプションからResponses_by_loadstepを選択し、複数の異なる荷重ステップに対して同じ応答を選択します。
$
$ OBJECTIVES Data
$
$
$HMNAME OBJECTIVES 2objective
$
DESOBJ(MIN)=5
$
$
DESGLB 9
$
$
$HMNAME LOADSTEPS 1brake
$
SUBCASE 1
SPC = 1
LOAD = 2
$
$HMNAME LOADSTEPS 2corner
$
SUBCASE 2
SPC = 1
LOAD = 3
$
$HMNAME LOADSTEPS 3pothole
$
SUBCASE 3
SPC = 1
LOAD = 4
$
BEGIN BULK
$HMNAME DESVARS 1topo_arm
$TPL 1 0.0 0.0 1 1 14
$
$ OPTIRESPONSES Data
$
DRESP1 3 comp COMP PSOLID 14
DRESP2 5 wcomp 1
+ DRESP1L 3 1 3 2 3 3
DRESP1 9 vol VOLFRAC
$
$HMNAME DEQUATIONS 1eq1
$
DEQATN 1 f(a,b,c)=a+b+c
$
$
$ OPTICONSTRAINTS Data
$
$
$HMNAME OPTICONSTRAINTS 8vol
$
DCONSTR 8 9 0.1
DCONADD 9 8