応答
本セクションでは、下記の各項について説明しています:
内部応答
OptiStructでは、有限要素解析で計算された多数の構造応答、またはそれらの応答の組み合わせを、構造最適化で目的関数および制約条件として使用できます。
応答は、DRESP1バルクデータエントリを使用して定義します。応答の組み合わせは、DEQATNバルクデータエントリで定義された方程式を参照するDRESP2エントリ、または、LOADLIB入出力オプションによって識別されるユーザー定義の外部ルーチンを使用するDRESP3エントリを用いて定義します。応答は全体に関するもの、もしくはサブケース(荷重ステップ、荷重ケース)に関するもののいずれかです。応答の特性により、その特定の応答を参照する制約条件または目的関数を、サブケース内で参照する必要があるかどうかが決まります。
サブケースに依存しない応答
質量および体積
どちらも、構造全体、個々のプロパティ(コンポーネント)および材料、またはプロパティ(コンポーネント)および材料のグループに対して定義できるグローバルな応答です。
トポグラフィー最適化では、質量および体積を制約条件または目的関数として使用することはお奨めできません。どちらも、トポグラフィー最適化での設計変更による影響をあまり受けません。
多くのプロパティ(コンポーネント)を含む領域の質量または体積に制約条件を設定するには、選択されたプロパティ(コンポーネント)の体積をSUM関数を使って合計することができます。そうでない場合、制約条件は、領域内の個別のプロパティ(コンポーネント)ごとに適用すると見なされます。あるいは、DRESP2方程式を定義してこれらのプロパティ(コンポーネント)の質量または体積を合計する必要があります。これは、すべてのプロパティ(コンポーネント)で同じ材料を使用し、その材料に質量または体積の制約条件を適用することで、回避できます。
=VOLUMEおよびATTA=ENCLOSEDを使うと、形状、フリー形状およびトポグラフィー最適化のために閉空間の応答を生成することができます。ENCLOSEDオプションは、この応答が閉じた2次元メッシュによって定義された閉空間であることを示します(自由エッジはサポートされていません)。この閉空間応答タイプには、ATTIフィールドがPIDにセットされている必要があります。PIDにより定義されているメッシュが完全に閉じている限り、複数のATTiが許可されます。プロパティタイプは、PSHELL、PCOMPまたはPSHEARのみです。2次元メッシュの法線は常に同じ向きでなければならず、メッシュはボリュームデータを捕捉するに十分細かい必要があります。ボリュームはメッシュに基づいて計算され、粗いメッシュの使用は推奨されません。
質量率および設計領域体積率
どちらも0.0~1.0の値をとるグローバルな応答です。これらは、トポロジー最適化での初期設計空間の比を表わします。どちらも、構造全体、個々のプロパティ(コンポーネント)および材料、またはプロパティ(コンポーネント)および材料のグループに対して定義できます。
質量率と体積率の違いは、質量率では比率の計算に非設計領域の質量が含まれ、体積率では設計領域の体積のみが考慮されるという点です。
体積率 = (現在の繰り返し計算での合計体積 – 初期の非設計領域の体積)/初期の設計領域の体積
質量率 = 現在の繰り返し計算での合計質量/初期の合計質量
トポロジー最適化に加えて寸法および形状の最適化を実行する場合、参照値(初期の設計領域の体積)は寸法および形状が変化しても影響を受けません。場合によってはこれにより、応答が負の値になることがあります。したがって、寸法および形状の最適化を実行する場合は、体積率の応答ではなく、体積の応答を使用することをお奨めします。
これらの応答は、トポロジー設計ドメインにのみ適用できます。これ以外の場合は、エラーが発生してOptiStructは終了します。
重心位置
これは、構造全体、個々のプロパティ(コンポーネント)および材料、またはプロパティ(コンポーネント)および材料のグループに対して定義できるグローバルな応答です。
デフォルトでは、重心応答は基本座標系を基準に計算されます。計算用のユーザー定義座標系の指定については、PARAM, UCORDをご参照ください。
慣性モーメント
これは、構造全体、個々のプロパティ(コンポーネント)および材料、またはプロパティ(コンポーネント)および材料のグループに対して定義できるグローバルな応答です。
デフォルトでは、慣性モーメントは基本座標系を基準に計算されます。計算用のユーザー定義座標系の指定については、PARAM, UCORDをご参照ください。
重み付きコンプライアンス
これは構造全体に対して定義されるグローバルな応答です。
固有値の逆数に対する重み付け(周波数)
この重み付けでは、高次の周波数の影響より低次の周波数の影響を増加させて、目的関数に大きな影響を与えるようになっています。すべてのモードの周波数を単純に加算するだけであれば、OptiStructは低周波のモードより高周波のモードを増大させるように処理します。これは構造全体に対して定義されるグローバルな応答です。
コンプライアンスの重ね合わせによる指標
これは構造全体に対して定義されるグローバルな応答です。
正規化係数は、コンプライアンスおよび固有値が関与する度合いを正規化するために使用されます。一般的な構造のコンプライアンスの値は、1.0e4~1.0e6のオーダーです。ただし、一般的な固有値の逆数は、1.0e-5のオーダーです。NORMが使用されない場合、線形静解析のコンプライアンスの要件が解に対して支配的になります。
ここで、はすべてのサブケース(荷重ステップ、荷重ケース)で最も大きなコンプライアンスの値、はその指標に含まれる最も低い固有値です。
新しい設計問題では、を正確に予測できない場合があります。この場合には、最初の反復計算で得られたコンプライアンスと固有値を基に、OptiStructが自動的に値を計算します。
ビード離散化率
これは、トポグラフィー設計領域に対するグローバルな応答です。この応答は、1つまたは複数のトポグラフィー設計領域についての形状変化の量を表します。応答は0.0~1.0の値をとり(0.0 < BEADFRAC < 1.0)、0.0は形状変化が全く起こっていないことを、1.0はトポグラフィー設計領域全体が許容され得る最大の形状変化を受けることを示します。
ランダム応答解析
PSD応答とRMS応答
PSD変位、PSD速度、PSD加速度、PSD音響圧力、PSD応力、PSDひずみ、RMS変位、RMS速度、RMS加速度、RMS音響圧力、RMS応力およびPSDひずみ応答がグローバルとして、また、サブケース依存の応答が使用できます(この情報は、サブケース依存でも得られます)。
サブケース依存
線形静解析
ここで、
ここで、 は定数です。
最大剛性について、コンプライアンスは最小化できます。
ここで、 は定数です。
コンプライアンス内の要素
コンプライアンスは、構造全体、個々のプロパティ(コンポーネント)および材料、またはプロパティ(コンポーネント)および材料のグループに対して定義できます。コンプライアンスは静的サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
多くのプロパティ(コンポーネント)を含む領域のコンプライアンスに制約条件を設定するには、選択されたプロパティ(コンポーネント)のコンプライアンスをSUM関数を使って合計することができます。そうでない場合、制約条件は、領域内の個別のプロパティ(コンポーネント)ごとに適用すると見なされます。あるいは、DRESP2方程式を定義してこれらのプロパティ(コンポーネント)のコンプライアンスを合計する必要があります。これは、すべてのプロパティ(コンポーネント)で同じ材料を使用し、その材料にコンプライアンスの制約条件を適用することで、回避できます。
静的変位
変位は線形静解析の結果です。節点の変位を応答として選択できます。ベクトル成分または絶対値による指標として選択することもできます。これらは、線形静的サブケースに割り当てる必要があります。
均質材料の静的応力
さまざまな応力のタイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。要素応力が使用され、制約条件スクリーニングが適用されます。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
応力応答計算を考察するための要素のクラスターサイズは、ATTBを介してサポートされます。 32
コーナー応力は、ATTB=CORNERを設定することで使用が可能です。コーナー応力応答がサポートされているのは、形状、寸法、および自由形状の最適化のみです。
トポロジーおよびフリー寸法最適化の応力応答
Normベースのアプローチ(トポロジーとフリー寸法最適化)
Normベースのアプローチは、トポロジーとフリー寸法の最適化の応力応答を処理するためのデフォルトの方法です。この方法は、DRESP1バルクデータエントリの対応する応力応答RTYPEが入力されるときに使用されます。
Response-NORMの集計は、モデル内の要素のグループについて応力応答を計算するために内部的に使用されます。ソリッド、シェル、バー応力、およびソリッドコーナー応力は、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェル応力についてのみサポートされます)。詳細については、NORMメソッドをご参照ください。
Normベースのアプローチ(トポロジーとフリー寸法最適化)
Normベースのアプローチは、トポロジーとフリー寸法の最適化の応力応答を処理するためのデフォルトの方法です。この方法は、DRESP1バルクデータエントリの対応する応力応答RTYPEが入力されるときに使用されます。
Response-NORMの集計は、モデル内の要素のグループについて応力応答を計算するために内部的に使用されます。ソリッド、シェル、バー応力、およびソリッドコーナー応力は、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェル応力についてのみサポートされます)。詳細については、NORMメソッドをご参照ください。
拡張ラグランジュ法(ALM)(トポロジー最適化のみ)
拡張ラグランジュ法(ALM)は、トポロジー最適化の応力応答を処理するための代替方法です。DRESP1バルクデータエントリを使用して局所応力応答を指定するときに、DOPTPRM,ALMTOSTR,1を使用してアクティブにすることができます。
ALMは、式 9に示す局所応力制約を使用してトポロジー最適化問題を効率的に解くための代替方法です。
- トポロジー設計変数のベクトル
- 目的関数
- j番目の拘束
- 局所応力制約の数
- 制約の総数
- 要素密度
- 要素フォンミーゼス応力
- 応力の上限
- ラグランジュ乗数推定値
- 2次ペナルティ係数
ラグランジュ乗数推定値は、のように更新されます。
一般的に、局所応力制約の数は、非常に大きくなります。式 9を直接解くと、計算時間が長くなります。目的関数に応力の制約条件を課すことによって、制約の総数を大幅に削減できます。その結果、最適化問題を効率的に解くことができます。
デフォルトのStress-norm(P-norm)メソッドも、局所的な応力制約を伴うトポロジー最適化問題を効率的に解きます。ALM1は、このようなモデルに適した代替手段です。
グローバルなフォンミーゼス応力応答(トポロジーとフリーサイズ最適化)
- 応力の制約条件は、1つのフォンミーゼス許容応力に限定されます。異なる許容応力を有する異なる材料が構造内に存在する場合、特異トポロジーの現象が発生します。特異トポロジーは、応力の制約条件の条件付き性質に関連した問題のことで、要素がなくなると、要素の応力制約条件は消失します。これは、設計領域全体で勾配ベースの最適化エンジンによっては通常得ることができない解をもつ多数の縮退問題が存在するという別の問題を生じます。
- 部分領域の削除によりすべての応力制約条件が削除される惧れがあり、これにより最適化問題が正しく設定されなくなるため、構造の部分領域についての応力の制約条件は許可されません。したがって、応力の制約条件は、アクティブである際は、設計領域と非設計領域の両方を含むモデル全体に適用され、応力制約条件の設定は、すべてのDSIZEおよびDTPLカードについて等しくなければなりません。
- 集中荷重および集中境界条件によって生じる人工的応力制約条件をフィルタにかけるために、ビルトインインテリジェンスが装備されています。境界形状に起因する応力集中も、局所的な形状の最適化でより効率的に改良されるよう、ある程度フィルタにかけられます。
- 応力の制約条件がアクティブである要素が多数あるために、.outファイル内の保持された制約条件の表に要素応力のレポートが示されません。モデルの応力の状態の反復計算履歴は、HyperViewまたはHyperMeshで確認できます。
- 応力の制約条件は、1次元要素には適用されません。
- モデル内に強制変位が存在する場合、応力の制約条件は使用されない場合があります。
座屈係数は、ベース板厚がゼロではない場合、シェルトポロジー最適化問題として制約されることが可能です。座屈係数の制約条件は、トポロジー最適化のその他のケースには適用できません。
| 複合材の応力 | 複合材のひずみ | 複合材の破壊基準 |
| 周波数応答応力 | 周波数応答ひずみ | 周波数応答フォース |
均質材料の節点応力
さまざまな節点応力タイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。節点応力が使用され、制約条件スクリーニングが適用されます。現在これがサポートされているのは、形状、寸法、および自由形状の最適化のみです。
節点応力応答をアクティブ化するには、RTYPEフィールドをGPSTRにセットします。
トポロジー最適化最適化の節点応力応答は、DRESP1バルクデータエントリ上の対応するGPSTR応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の節点のグループについて破壊応答を計算するために使用されます。詳細については、NORMメソッドをご参照ください。
均質材料の静的ひずみ
さまざまなひずみのタイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。要素ひずみが使用され、制約条件スクリーニングが適用されます。また、トポロジー設計空間では、ひずみの制約条件を定義することはできません。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
コーナーひずみは、ATTB=CORNERを設定することで使用が可能です。コーナーひずみ応答がサポートされているのは、形状、寸法、および自由形状の最適化のみです。
トポロジー最適化およびフリー寸法最適化のひずみ応答は、DRESP1バルクデータエントリ上の対応するひずみ応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについてひずみ応答を計算するために使用されます。ソリッド、シェル、バー応力およびソリッドコーナーひずみは、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェルひずみについてのみサポートされます)。詳細については、NORMメソッドをご参照ください。
複合材レイアップの静的応力
さまざまな複合材の応力タイプを応答として定義できます。これらは、PCOMP(G)、PCOMPPコンポーネント、要素、またはPLYタイプのプロパティに対して定義されます。プライレベル結果が使用され、制約条件スクリーニングが適用されます。トポロジー設計空間および / またはフリー寸法設計空間では、複合材の応力の制約条件を定義することも可能です。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
トポロジー最適化およびフリー寸法最適化の応力応答は、DRESP1バルクデータエントリ上の対応する応力応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについて応力応答を計算するために使用されます。詳細については、NORMメソッドをご参照ください。
複合材レイアップの静的ひずみ
さまざまな複合材のひずみのタイプを応答として定義できます。これらは、PCOMP(G)、PCOMPPコンポーネント、要素、またはPLYタイプのプロパティに対して定義されます。プライレベル結果が使用され、制約条件スクリーニングが適用されます。トポロジー設計空間および / またはフリー寸法設計空間では、複合材のひずみの制約条件を定義することも可能です。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
トポロジー最適化およびフリー寸法最適化のひずみ応答は、DRESP1バルクデータエントリ上の対応するひずみ応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについてひずみ応答を計算するために使用されます。詳細については、NORMメソッドをご参照ください。
複合材レイアップの静的破壊基準
さまざまな複合材の破壊基準を応答として定義できます。これらは、PCOMP(G)コンポーネント、要素、またはPLYタイプのプロパティに対して定義されます。プライレベル結果が使用され、制約条件スクリーニングが適用されます。トポロジー設計空間では、複合材の破壊基準の制約条件を定義することができます。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
トポロジー最適化およびフリー寸法最適化の複合材破壊応答は、DRESP1バルクデータエントリ上の対応する破壊応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについて破壊応答を計算するために使用されます。詳細については、NORMメソッドをご参照ください。
静的破壊
さまざまな破壊基準を応答として定義することができます。それらは、ソリッドおよびシェル要素のみについてサポートされています。破壊基準は、MAT1またはMATT1エントリで定義が可能です。
静的フォース
さまざまな力(フォース)のタイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。制約条件スクリーニングが適用されます。また、トポロジー設計空間では、力の制約条件を定義することはできません。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
拘束された節点における単一点荷重
この応答は、DRESP1バルクデータエントリ(RTYPE=SPCFORCE)を使用して定義できます。この応答は、拘束された節点で定義されます。この応答には制約条件スクリーニングが適用されます。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
節点力
この応答は、DRESP1バルクデータエントリ(RTYPE=SPCFORCE)を使用して定義できます。この応答は、特定の節点力成分への非剛体要素(そのグリッドへ結合される)の寄与を定義します。この応答には制約条件スクリーニングが適用されます。ATTiによって複数の要素が指定された場合は、複数の応答が生成されます。その際、各応答で、指定された要素による、指定されたグリッドでの節点力成分への寄与が計算されます。これは線形静的サブケース(荷重ステップ、荷重ケース)関連の応答です。
ボア変形
トポロジーおよびフリー寸法最適化の応力応答は、DRESP1バルクデータエントリを使用して定義できます。作成される応答を妥当な数に保持するために、応力応答はStress-NORMアプローチを用いて内部的に集計されます。
熱伝導解析
温度
温度は、熱伝導解析の結果であり、熱伝導サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。温度の応答は、複合材トポロジー最適化とフリー寸法最適化では使用できません。
熱コンプライアンス
- 温度ベクトル
- パワーベクトル
- 伝導マトリックス
- 対流マトリックス
熱コンプライアンスを最小化する際、熱流束入力の節点における温度が最小化されます。最適な構造は、熱エネルギーの最大伝導を提供します。熱コンプライアンスはスムーズな凸関数であるため、一般的に、構造全体の温度のmin-maxを実行するよりも、熱コンプライアンスを最小化するほうがより効率的です。熱-構造最適化中、温度フィールドは各反復計算について更新されます。さらに、熱-構造トポロジー最適化では、密度設計変数が伝導係数に影響を及ぼし、伝導係数はペナルティも受けます。
熱コンプライアンス応答は、寸法、形状、トポロジーおよびフリー寸法最適化で使用できます。
節点流れ圧力(ダルシーフロー解析)
ダルシーフロー解析では、節点流れ圧力を最適化応答として使用できます。RTYPEはFLOWPRESとして設定し、ATTiフィールドは目的の節点の節点IDを指すようにする必要があります。これは、現在、定常熱伝導解析によるトポロジー最適化(ダルシーフロー解析がアクティブになっている)でのみサポートされます。
ノーマルモード解析
Frequency
固有振動数は、ノーマルモード解析の結果であり、ノーマルモードのサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。最初のモードだけではなく、幾つかの低いほうのモードについて、振動数を制約することが推奨されます。
- DRESP1エントリのATTAフィールドを、応答として使用したいノーマルモード数に等しく設定します。このプロセスでは、最適化されるべきモード数を特定して提供します。
- また、既存のノーマルモードサブケースに加えて別のモーダル周波数応答サブケースを加えることにより、ピーク荷重周波数における最大モード寄与度を伴うモードの番号を求めることも可能です。ATTAフィールドはモード数を特定し、ATTiフィールドはモーダル周波数応答サブケースのサブケースIDに等しく設定する必要があります。モーダル周波数応答解析サブケースには、ピーク識別基準を定義するPEAKOUTエントリが含まれていなくてはなりません。OptiStructは、対応する応答に最も寄与する各ピーク応答についてモード(ATTA)をピックすることにより、モーダル周波数応答解析に基づき、最適化されるべきモードを内部的に特定します。したがって、最適化用に特定された最大モード数は、 (ATTA) * NPEAK (PEAKOUT上)に等しくなります。
モード形状
モード形状は、ノーマルモード解析の結果です。モード形状を応答として選択できます。ベクトル成分または絶対値による指標として選択することもできます。これらは、ノーマルモードのサブケースに割り当てる必要があります。
線形座屈解析
座屈係数は、座屈解析の結果であり、座屈のサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
座屈係数
典型的な座屈制約条件は下限が1.0で、構造が指定された静的荷重で座屈していないことを示します。最初のモードだけではなく、幾つかの低いほうのモードについて、座屈係数を制約することが推奨されます。
線形過渡応答解析
過渡コンプライアンス
- 適用される力(時間依存)の転置
- 過渡変位
- 解析終了時間
- 感度計算のための随伴法が導入されています。
- 強制変位荷重(SPCD)はサポートされていません。
- MTRAN解析のみがサポートされています。
- 現時点では、寸法、形状およびトポロジー最適化がサポートされています。
過渡変位
- 過渡変位
- 負荷加振
- 感度計算のための直接および随伴法が導入されています。
- SPCDはサポートされていません。
- MTRANおよびDTRAN解析がサポートされています。
- 現時点では、寸法、形状およびトポロジー最適化がサポートされています。
変位差の平均平方根
ここで、およびはそれぞれ、GRID ID およびの過渡変位です。
- 感度計算のための随伴法が導入されています。
- MTRAN解析のみがサポートされています。
- 現時点では、寸法、形状およびトポロジー最適化がサポートされています。
周波数応答関数(FRF解析)
周波数応答変位
変位は周波数応答解析の結果です。節点の加速度、すなわちtranslational、rotationalおよびnormal 1を応答として選択できます。加速度は、実数/虚数または絶対値/位相の形式でベクトル成分として選択することができます。加速度は周波数応答サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
周波数応答速度
速度は周波数応答解析の結果です。節点の速度、すなわちtranslational、rotationalおよびnormal2を応答として選択できます。加速度は、実数/虚数または絶対値/位相の形式でベクトル成分として選択することができます。加速度は周波数応答サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
周波数応答加速度
加速度は周波数応答解析の結果です。節点の加速度、すなわちtranslational、rotationalおよびnormal3を応答として選択できます。加速度は、実数/虚数または絶対値/位相の形式でベクトル成分として選択することができます。加速度は周波数応答サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
周波数応答応力
さまざまな応力のタイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。要素応力は実数/虚数または絶対/位相値の形式では使用されず、制約条件スクリーニングが適用されます。ソリッドおよびシェル要素についてのフォンミーゼス応力も、直接応答として定義することが可能です。力は周波数応答サブケース(荷重ステップ、荷重ケース)関連の応答です。
トポロジー最適化およびフリー寸法最適化のFRF応力応答は、DRESP1バルクデータエントリ上の対応する周波数応答の応力応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについて応力応答を計算するために使用されます。ソリッドおよびシェルFRF応力は、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェルFRF応力でのみサポートされます)。詳細については、NORMメソッドをご参照ください。
周波数応答ひずみ
さまざまなひずみのタイプを応答として定義できます。これらは、コンポーネント、プロパティ、または要素に対して定義されます。要素ひずみは実数/虚数または絶対値/位相の形式では使用され、制約条件スクリーニングが適用されます。ソリッドおよびシェル要素についてのフォンミーゼスひずみも、直接応答として定義することが可能です。力は周波数応答サブケース(荷重ステップ、荷重ケース)関連の応答です。
トポロジー最適化およびフリー寸法最適化のFRFひずみ応答は、DRESP1バルクデータエントリ上の対応する周波数応答のひずみ応答RTYPEを通して得られます。
Response-NORMの集計は、モデル内の要素のグループについてひずみ応答を計算するために使用されます。ソリッドおよびシェルFRFひずみは、Response-Normの集計アプローチでサポートされます(フリー寸法最適化はシェルFRFひずみでのみサポートされます)。詳細については、NORMメソッドをご参照ください。
周波数応答フォース
さまざまな力(フォース)のタイプを応答として定義できます。力は、実数/虚数または絶対値/位相の形式でコンポーネント、プロパティまたは要素について定義することができます。制約条件スクリーニングが適用されます。また、トポロジー設計空間では、力の制約条件を定義することはできません。力は周波数応答サブケース(荷重ステップ、荷重ケース)関連の応答です。
Powerflow
Powerflowは、RTYPEフィールドをFRFLOWに設定することによって応答として定義することができます。ATTiフィールドを介して特定されたSECTIONエントリについて計算され、制約条件スクリーニングが適用されます。トポロジー、寸法および形状最適化でサポートされます。
ランダム応答解析
PSD応答とRMS応答
PSD変位、PSD速度、PSD加速度、PSD音響圧力、PSD応力、PSDひずみ、RMS変位、RMS速度、RMS加速度、RMS音響圧力、RMS応力およびPSDひずみ応答がグローバルとして、また、サブケース依存の応答が使用できます(この情報は、上記のサブケースに依存しない応答のセクションでも得られます)。
流体-構造連成FRF解析(音響解析)
音響圧力
音響圧力は、流体-構造連成周波数応答解析の結果です。流体節点上で出力される音響圧力が使用可能です。音響圧力は、流体-構造連成周波数応答サブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
マルチボディダイナミクス解析
弾性体応答
マルチボディダイナミクス問題については、1つまたは複数の弾性体の質量、重心位置および慣性モーメントが使用できます。これは、他の通常の構造応答に加えてです。
MBD変位
MBD変位は、マルチボディダイナミクス解析の結果です。これらは、マルチボディダイナミクスサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
MBD速度
MBD速度は、マルチボディダイナミクス解析の結果です。これらは、マルチボディダイナミクスサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
MBD加速度
MBD加速度は、マルチボディダイナミクス解析の結果です。これらは、マルチボディダイナミクスサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
MBDフォース
MBDフォースは、マルチボディダイナミクス解析の結果です。これらは、マルチボディダイナミクスサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
MBD式
MBD式の応答は、マルチボディダイナミクス解析の結果です。MBD式は、式の評価の結果です。これらは、マルチボディダイナミクスサブケース(荷重ステップ、荷重ケース)に割り当てる必要があります。
疲労解析
寿命 / 損傷 / 安全係数
=FATIGUE.寿命、損傷、および安全係数(FOS)は、疲労解析の結果です。これらは、疲労サブケースに割り当てる必要があります。
節点ベースの安全係数
RTYPE=GPFATである際の安全係数結果。これらは、疲労サブケースに割り当てる必要があります。
動的 / 非線形解析
相当塑性ひずみ
相当塑性ひずみは、等価静的荷重法を用いて非線形応答最適化が実行される際に、内部応答として使用することが可能です。これは、線形ひずみと塑性ひずみの間の近似された相関関係の使用を介して可能となり、ESL法の内部ループと外部ループでそれぞれ計算されます。
ESL速度
ESL速度は、等価静的荷重法を用いて非線形応答最適化が実行される際に、内部応答として使用することが可能です。RTYPE=ESLVオプションが、速度成分値およびGRID IDスペックと共に使用できます。
ガスケット圧力
ガスケット圧力は、最適化を含む非線形静解析が実行される際に、内部応答として使用することが可能です。ガスケット圧力応答は、RTYPE=GSKPオプションを用いてアクティブ化されます。PTYPEフィールドはPGASKを、ATTiフィールドは対応するPGASKID(s)を参照します。
接触圧力
接触圧力は、接触と最適化を含むモデルが実行される際に、内部応答として使用することが可能です。接触圧力応答は、RTYPE=CNTPオプションを用いてアクティブ化されます。PTYPEはCONTACTにセットされる必要があり、CONTACTバルクデータID(s)はATTiフィールドで参照が可能です。形状、フリー形状、および寸の最適化の場合、設計変数は接触領域の一部とすることができます。
接触力
接触力は、接触と最適化を含むモデルが実行される際に、内部応答として使用することが可能です。接触力応答は、RTYPE=CNTFオプションを用いてアクティブ化されます。PTYPEはCONTACTにセットされる必要があり、ATTAフィールドは着目する接触力アイテムのコードを指していなければなりません。対応するCONTACTバルクデータID(s)は、ATTiフィールドで参照が可能です。形状、フリー形状、および寸の最適化の場合、設計変数は接触領域の一部とすることができます。
ユーザー定義の応答
機能
関数は、設計変数、節点位置、応答、およびテーブルエントリ(あるいはこれらのいずれか同士)を組み合わせて数式で表現した応答です。関数がサブケース(荷重ステップ、荷重ケース)関連であるか、グローバルであるかは、方程式で使用される応答のタイプで決まります。関数の応答は、DRESP1、DRESP2およびDRESP3エントリを介して使用できます。DRESP3については、関数は外部応答を用いて定義されます。
外部応答
外部応答は、設計変数、節点位置、固有ベクトル、応答、およびテーブルエントリ(あるいはこれらのいずれか同士)を組み合わせてユーザー定義の外部ルーチンで表現したものです。関数がサブケース(荷重ステップ、荷重ケース)関連であるか、グローバルであるかは、ルーティンで使用される応答のタイプで決まります。詳細については、外部応答をご参照ください。
Appendix
NORMメソッド
- 応答NORM値
- 要素の数
- 各節点 / 要素“"の個別の応答値
- 各節点 / 要素に対する応答の限度
- ペナルティ(パワー)値(デフォルト = 6.0)
ペナルティまたはパワー値()は、パラメータDOPTPRM, PNORMを使用して変更できます。値 = 6.0はデフォルトで、( → )の値を大きくすると、NORM関数 → )の精度が向上しますが、最適化実行が不安定になる可能性があります。値が6より小さい場合( → 1)、応答のNORM関数は平均の比率に近づきます( → )。デフォルト値は、比率の最大値の妥当な近似値で、不安定性が低下します。
外部応答
DRESP3バルクデータエントリとLOADLIB入出力オプションエントリを組み合わせると、ユーザー定義の外部関数を介して応答を定義することが可能です。
外部関数は、Compose Open Matrix Language (OML)、Fortran、C、またはMicrosoft Excelワークブックで書くことができます。プログラミング言語にかかわらず、結果のライブラリおよびファイルはOptiStructによってアクセス可能でなければならず、一貫した関数のプロトタイピングが遵守され、適切なコンパイルオプションおよびリンクオプションが使用されていることが前提です。
最適化応答のための外部ライブラリの書き出し
OptiStructインストレーションには、正確な関数定義、引数およびコンパイル指示文を含んだ必要最小限の関数群がFortran用(dresp3_barebone.F)とC用(dresp3_barebone.c)に用意されています。
これらのファイルは、ユーザー自身の関数を書くスターティングポイントとして使用できます。ユーザー定義のMicrosoft Excelワークブックの使用による応答定義の詳細については、Microsoft Excelの例をご参照ください。
integer function myfunct(iparam, rparam, nparam,
iresp, rresp, dresp, nresp, isens
userdata)integer function myfunct(iparam, rparam, nparam,
iresp, rresp, dresp, nresp, isens
userdata)character*32000 userdata
integer nparam, nresp
integer iparam(nparam), iresp(nresp)
double precision param(nparam), rresp(nresp), dresp(nparam,nresp)int myfunct(int* iparam, double* rparam, int* nparam,
int* iresp, double* rresp, double* dresp, int* nresp, int*
isens, char* userdata)- 関数名は、小文字のみ、もしくは大文字のみのいずれかで書く
- 英数字のみを使用する
- 強調文字は使用禁止
- 関数名は8文字以下
関数の戻し値
外部関数は、成功裡の終了について0または1を戻します。1は、ユーザー定義の情報メッセージがOptiStructによって出力されるべきであることを示します。外部関数は、致命的なエラーの際は-1を戻します。このような場合、OptiStructはユーザー定義のエラーメッセージを出力した後、終了します。エラーおよび情報メッセージの詳細については、以下をご参照ください。
関数の引数
| 引数 | タイプ | 入力 / 出力 | 内容 |
|---|---|---|---|
iparam |
integer (table) | 入力 | 入力パラメータタイプ(オプション使用) |
rparam |
double (table) | 入力 | 入力パラメータ値 |
nparam |
integer | 入力 | パラメータ数 |
iresp |
integer (table) | 入力 | 出力応答要求(オプション使用) |
rresp |
double (table) | 出力 | 出力応答値 |
dresp |
double (table) | 出力 | 出力感度値 |
nresp |
integer | 入力 | 応答数 |
isens |
integer | 入力 | 感度出力フラグ |
userdata |
string | Input / Output | ユーザーデータ / エラーまたは情報メッセージ |
nparamは、DRESP3カードで定義された入力パラメータの数です。rparam(nparam)には、OptiStructによって評価される入力パラメータの値が含まれます。iparam(nparam)は、上記の入力パラメータのタイプを示します。
パラメータ値は、タイプとは無関係に、DRESP3カードで定義された順に渡されます。パラメータタイプ一覧は、検証やコードの分岐等を行うためにオプションで使用することが可能です。
- パラメータタイプ
iparamValue- DESVAR
- 1
- DTABLE
- 2
- DGRID/DGRIDB
- 3
- DRESP1
- 4
- DRESP2
- 5
- DRESP1L
- 6
- DRESP2L
- 7
- DVPREL1
- 8
- DVPREL2
- 9
- DVMREL1
- 10
- DVMREL2
- 11
- DVCREL1
- 12
- DVCREL2
- 13
- DVMBRL1
- 14
- DVMBRL2
- 15
- DEIGV
- 16
- DGRIDB
- 18
nrespは、DRESP3カードのMAXRESPフィールドに定義されているとおり、関数が計算できる応答の最大数です。rresp(nresp)は、外部関数によって評価された応答の値を戻します。iresp(nresp)には、以下に説明する応答要求が含まれます。応答要求一覧は、使用可能である応答のいずれがOptiStructによって実際に必要とされているかを示します。
iresp(nresp)内のエントリは、要求された応答の場合は1、それ以外は0でフラグが立てられます。OptiStructが必要としない応答を評価することなく計算結果を保存するために、この情報をオプションで使用することが可能です。
Userdataストリング
関数入力において、userdataストリングは、DRESP3カードのUSRDATAフィールドに定義されているデータを含みます。このストリングは、関数に定数やその他の関連情報を渡す便利な機能を提供します。ストリングの中身について制限はありませんが、長さは最大で32,000文字となっています。
関数を終了する際、ストリングにはユーザー定義のエラーまたは情報メッセージが含まれる場合があります。更新されたストリングはOptiStructに戻され、標準出力(.outファイルおよび/または画面)に出力されます。ここでも、32,000文字を超えない限り、ストリングの中身は制約されません。
エラーまたは情報メッセージは、改行標識として文字"|"を使ってフォーマットすることが可能です。標準Cエスケープシーケンスもサポートされています。OptiStructの出力ファイルで同じきまりが使用されているため、各行が80文字以下になるようメッセージをフォーマットすることは推奨されますが、必ずしも必要ではありません。
感度フラグ
isensは、コード内で感度が要求されているかどうかを示します。isensがオフとなっている場合、感度の計算はスキップすることが推奨されます。これにより、不要な計算が回避されます。
最適化応答のための外部ライブラリの構築
WindowsまたはLinuxで共有ライブラリを構築します。
詳細については、外部ライブラリの構築をご参照ください。
Altair Composeを使用した外部応答
Composeを起動してインストールパスを指定します。
外部応答(DRESP3)でOptiStructジョブの実行中にAltair Composeを起動する必要がある場合、Composeのインストールパスはユーザーによって指定される必要があります。
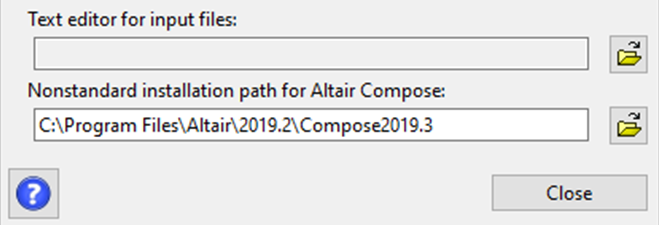
図 2.- Options欄
詳細は、実行オプションの-composeをご参照ください。
Open Matrix Language(OML)を使った外部ユーザー定義ルーチンのインプリメントについては、 Compose OMLのスクリプト記述に関するドキュメントをご参照ください。
Composeは、WindowsおよびLinuxオペレーティングシステムでサポートされています。
外部ライブラリ応答(DRESP3)の例
FortranおよびC-共有ライブラリ
ここで参照されている全てのファイルは、Altair Simulationインストールディレクトリ<install_directory>/hwsolvers/demos/optistructの下に収められています。下記の例を実行するには、以下に挙げられているファイル群を自身の作業ディレクトリにコピーしてください。
ファイルdresp3_simple.Fおよびdresp3_simple.cには、FortranとCでそれぞれ書かれた外部関数のシンプルな例のソースコードが含まれています。両方の関数とも、mysumと命名されており、2つの応答、すなわちパラメータの合計とパラメータの平均合計を計算します。
LOADLIB DRESP3 FLIB dresp3_simple_f.dll
LOADLIB DRESP3 CLIB dresp3_simple_c.dllDRESP3 6 SUMF FLIB MYSUM 1 2
+ DRESP1 2 3
DRESP3 7 AVGF FLIB MYSUM 2 2
+ DRESP1 2 3
DRESP3 8 SUMC CLIB MYSUM 1 2
+ DRESP1 2 3
DRESP3 9 AVGC CLIB MYSUM 2 2
+ DRESP1 2 3DEQATN 1 F(x,y) = x+y
DEQATN 2 F(x,y) = avg(x,y)
DRESP2 4 SUME 1
+ DRESP1 2 3
DRESP2 5 AVGE 2
+ DRESP1 2 3OptiStructでこの入力デックを実行すると、Fortran外部関数、C外部関数および内部方程式は常に同じ値を戻し、最適化プロセスを通して同時に更新されることが分ります。
ファイルdresp3_advanced.Fには、2番目の例のFortranソースコードが含まれており、ここではDRESP3の高度な機能を使用します。
- USRDATAストリングは、応力またはひずみが要求されているかを判断するために解析され、要求されていない場合はエラーメッセージが戻されます。
- パラメータ数は、シェル要素またはソリッド要素が扱われているかどうかを判断し、その数が3または6に等しくない場合はエラーメッセージが戻されます。
- 応力またはひずみ成分が求められているため、パラメータがタイプDRESP1またはDRESP1Lでない場合はエラーメッセージが戻されます。
- 関数が2つの異なる応答を計算することができても、その関数がコールされた際は、OptiStructによって実際に要求されている応答のみが計算されます。
- どの応答が評価されているかを示す情報メッセージが戻されます。
入力デックdresp3_advanced.femは、解析のみにこの外部関数を用いたシンプルな問題の例を含んでいます。
DRESP1 10 SXX2D STRESS ELEM SX1 100
DRESP1 11 SYY2D STRESS ELEM SY1 100
DRESP1 12 SXY2D STRESS ELEM SXY1 100
DRESP1 13 SXX3D STRESS ELEM SXX 50
DRESP1 14 SYY3D STRESS ELEM SYY 50
DRESP1 15 SZZ3D STRESS ELEM SZZ 50
DRESP1 16 SXY3D STRESS ELEM SXY 50
DRESP1 17 SXZ3D STRESS ELEM SXZ 50
DRESP1 18 SYZ3D STRESS ELEM SYZ 50
DRESP1 20 SVM2D-1 STRESS ELEM SVM1 100
DRESP1 21 SMP2D-1 STRESS ELEM SMP1 100
DRESP1 22 SVM3D-1 STRESS ELEM SVM 50
DRESP1 23 SMP3D-1 STRESS ELEM SMP 50DRESP3 30 SVM2D-3 STRLIB GETSTR 1 2
+ DRESP1 10 11 12
+ USRDATA STRESS
DRESP3 31 SMP2D-3 STRLIB GETSTR 2 2
+ SECOND 30
DRESP3 32 SVM3D-3 STRLIB GETSTR 1 2
+ DRESP1 13 14 15 16 17 18
+ USRDATA STRESS
DRESP3 33 SMP3D-3 STRLIB GETSTR 2 2
+ SECOND 32Microsoft Excelの例
Microsoft ExcelワークブックをLOADLIBエントリによって参照し、ユーザー定義の応答を定義することができます。
暗黙的なオプションと明示的なオプションの両方を使用でき、ここで定義されます。
LOADLIB DRESP3 ELIB dresp3_excel.xlsx
DRESP3 10 SUM ELIB MYSUM
+ DRESP1 5 6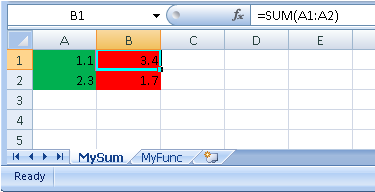
図 4.
LOADLIB DRESP3 ELIB dresp3_excel.xlsx
DRESP3 20 FUNC ELIB MYFUNC
+ DRESP1 5 6 7 8
+ DESVAR 1
+ CELLIN B3 THRU B6
+ CELLIN C10
+ CELLOUT E10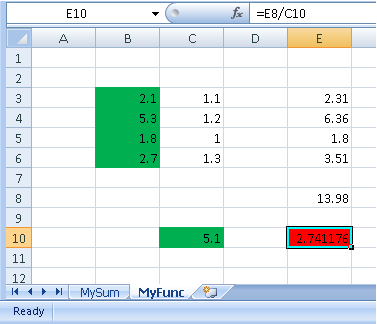
図 5.