荷重および境界条件
ここでは次の境界条件について説明します。
静荷重と境界条件
- 直接節点にかけられる荷重
- サーフェスの圧力
- 重力荷重
- 等速回転による遠心力
- 以下によって等価的に発生する荷重
- 熱膨張
- 構造要素の強制変形
- 節点の強制変位
入力ファイルのバルクデータセクションには、任意の数の荷重セットを定義できます。ただし、線形静解析、慣性リリーフおよび非線形静解析で説明されているように、問題の解析にはサブケース情報セクションで選択されたセットのみが使用されます。各タイプの荷重を選択する方法は、関連するバルクデータステートメントの記述で指定します。
FORCEステートメントは、節点に与えられる静荷重を、局所座標系で定義された荷重成分で定義するために使用します。荷重成分の方向は、荷重の定義に使用する局所座標系のタイプに依存します。
FORCE1ステートメントは、2つの節点を結ぶベクトルで荷重方向が決まる場合に使用します。
MOMENTステートメントおよびMOMENT1ステートメントは、節点に集中しているモーメントの適用を定義するために使用します。
ACCEL、ACCEL1およびACCEL2エントリは、モデル内の節点における加速度荷重の適用を定義するために使用されます。
三角形要素および四角形要素への圧力荷重は、PLOAD2カードで定義されます。荷重の正方向は、右手の法則を使用し、要素結合カード上の節点の順で決まります。荷重の大きさと方向は、圧力の値と要素に属する節点の座標により自動的に計算されます。荷重は要素に属する節点にかけられます。
PLOAD圧力荷重を上記と同じような方法で使用して、任意の3つまたは4つの節点に対する荷重を定義できます。これは、対象となる節点が2次元要素に属しているかどうかには関係ありません。
HEXA、PENTA、およびTETRAの各ソリッド要素への圧力荷重は、PLOAD4カードで定義されます。この圧力は、要素から外側に向かう方向が正と定義されています。節点に対する等価な力の大きさと方向は、荷重がかかっている要素のアイソパラメトリック形状関数を使用して自動的に計算されます。QUAD4要素およびTRIA3要素に対する圧力荷重も、PLOAD4カードを使用して与えられます。
PLOAD1カードは、CBARまたはCBEAM要素への集中荷重、一様分布荷重あるいは線形分散荷重を表すために使用されます。
GRAVバルクデータエントリは、定義された任意の座標系で重力ベクトル成分を与えることによって重力荷重を指定するのに使用します。重力荷重は、重力ベクトルと構造モデルの質量マトリックスから得られます。スカラーポイントで重力加速度が計算されていないため、ユーザーがスカラーポイントで直接重力荷重を導入する必要があります。
RFORCEステートメントは、遠心力場による静荷重条件の定義に使用します。遠心力荷重は、回転軸上の節点の設定、および、定義された任意の座標系での回転速度成分と回転加速度成分により指定されます。遠心力の計算において、質量マトリックスは、節点に結合された別個の剛体のセットに関連したものになります。スカラーポイントの使用、節点間の質量結合の使用など、この観点から逸脱した場合には、エラーが発生する場合があります。
温度荷重は、節点においてのみ定義できます。結合された節点の温度は、TEMPバルクデータエントリとTEMPDバルクデータエントリで与えられます。熱膨張係数は、材料定義カードで定義されます。単に熱フィールドが存在するだけでは、熱荷重を適用することにはなりません。ユーザーがサブケース情報セクションで具体的に要求しない限り、熱荷重は適用されません。
バルクデータセクションのLOADカードでは、節点に直接かけられる荷重、圧力荷重、重力荷重、および遠心力からなる荷重セットの線形組み合わせである静的負荷条件を定義します。節点に直接かけられる荷重、圧力荷重、あるいは遠心力と組み合わせて重力荷重が使用される場合には、このカードを使用する必要があります。組み合わせ荷重条件を適用するには、サブケース情報セクションで、LOADの組み合わせのセット番号を選択します。
等価荷重(熱および強制変位)は、サブケース情報セクションで別途選択します。そのためには、等価荷重には一意なセット識別番号が必要です。どのような解法でも、全荷重は、かけられた荷重(節点荷重、圧力荷重、重力荷重、および遠心力)と等価荷重の合計となります。
ゼロ強制変位は、SPCまたはSPC1カードで指定できます。ゼロ変位により、拘束された節点にゼロでない力(SPC荷重)が加わります。
SPCADDステートメントを使用すると、異なるSPCの組み合わせセットが可能になります。
慣性リリーフ解析において、加速度荷重を計算する際の反力の自由度は、SUPORTステートメントまたはSUPORT1ステートメントで定義されます。各サブケースにつき、自由度を最大6つ定義できます。
ゼロ強制変位は、SPCカードまたはSPCDカードで指定できます。SPCカードでは、拘束される成分と強制変位の大きさの両方を指定します。SPCDカードでは、強制変位の大きさのみを指定します。SPCDカードを使用する場合、拘束される成分をSPCカードまたはSPC1カードのいずれかで指定する必要があります。SPCDカードを使用すると、強制変位の大きさのみが変化した場合に、剛性マトリックスを分解する必要がありません。
節点の強制変位による等価荷重は、プログラムにより計算され、与えられる他の荷重に加算されます。
強制変位の大きさがSPCカードで指定されている場合、ユーザーがサブケース情報セクションで該当のSPCを選択すると、この荷重は自動的に与えられます。
変位の大きさがSPCDカードで定義されている場合は、ユーザーがサブケース情報セクションで関連するLOADセットを選択すると、この荷重が与えられます。
慣性リリーフ
拘束されていない構造のシミュレーションが可能です。一般的な対象として、飛行中の航空機、自動車のサスペンション部品、宇宙空間の衛星などがあります。
慣性リリーフ解析では、適用される荷重が、一連の並進加速度および回転加速度によって均衡します。これらの加速度により、物体力が構造上に分布し、構造に適用された荷重の合計がゼロになります。この結果、適用された荷重によって構造が自由に加速しているような状態になり、定常状態の応力と変形形状が構造内に現れます。境界条件は、剛体の運動を制限する目的でのみ適用されます。外部荷重は加速度によって均衡しているので、これらの境界条件に対応する反力はゼロとなります。
この計算は自動で行われます。
慣性リリーフ境界条件は、入力デックのバルクデータセクションで定義されるか、もしくは、ソルバーによって自動的に決定されます。
SUPORTエントリの使用
- 慣性リリーフをアクティブにするには、PARAM,INREL,-1が使用されます。
- SUPORTおよびSUPORT1バルクデータエントリは、フリーボディの6つまでの反力の自由度を定義するために使用されます。
- SUPORTエントリは、関連するすべてのサブケースで使用されます。したがって、Subcase情報セクションで参照される必要はありません。
- SUPORT1エントリは、サブケース内で使用されるために、SUPORT1データセレクターステートメントによって参照される必要があります。
自動サポート生成
- 慣性リリーフ境界条件は、PARAM,INREL,-2を使用することによって、自動的に生成されます。
- 慣性リリーフ境界条件は、PARAM,INREL,-2を使用することによって、自動的に生成されます。
- PARAM,INRELのMETHODパラメータは、EIGRLまたはEIGRAエントリのIDを参照します。
- 固有値サブケースは内部的に生成され、剛体モード、内部荷重およびサポートポイントを計算します。
OptiStructでは、慣性リリーフが線形静解析、非線形静解析、およびモーダル法による周波数応答解析に適用できます。接触を伴う非線形静解析の場合、デフォルトでは慣性リリーフでサポートされるのはフリーズ接触のみです。フリーズ接触以外が存在する場合は、PARAM,IR4NLCON,YESにより、慣性リリーフを使用してモデルを実行できるようにします。慣性リリーフを伴う静解析サブケースは、線形座屈解析では参照できません。ノーマルモード解析では無意味です。
PARAM,PRINFACC,1は、慣性リリーフ剛体の力と加速度の出力などの追加情報を.outファイルに出力するために使用できます。
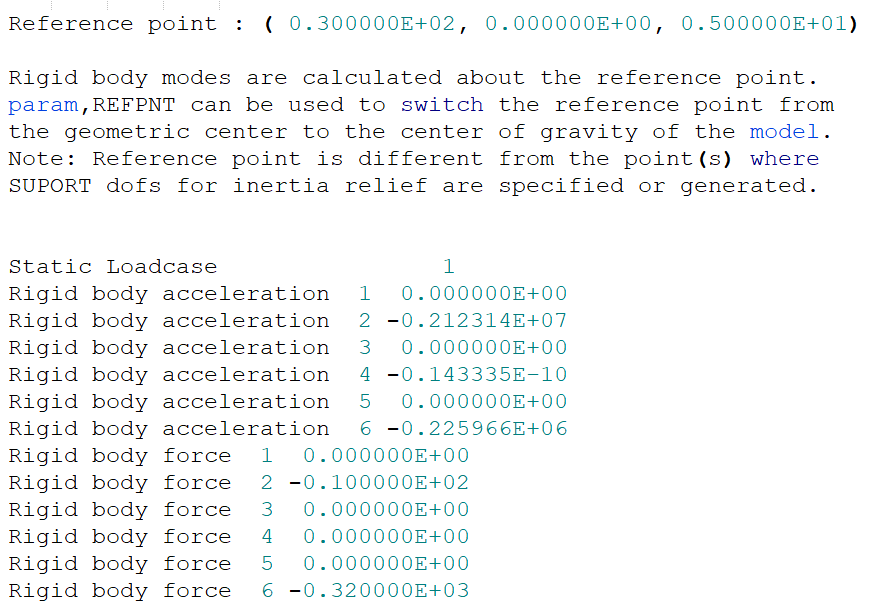
図 1.
理論
剛体モードでの構造の静解析では、慣性リリーフ計算を解析プロセスに含めることができます。特に、非-構造質量を含む構造は慣性リリーフ効果の影響を大きく受ける可能性があります。PARAM,INREL,-1またはPARAM,INREL,-2を使用することで、慣性リリーフ計算の組み込みを可能にできます。
- 荷重ベクトル
- 全体質量マトリックス
- モデル上の境界条件を満たすすべての剛体モードのセット
- 縮退変位ベクトル
- 縮退質量マトリックス
- 縮退荷重ベクトル
- PARAM,INREL,-1、またはPARAM,INREL,-2を使用した拘束構造:PARAM,INREL,-1が設定されている場合、またはPARAM,INREL,-2で構造が拘束されている場合は、慣性リリーフ下の静解析解法で次の式が使用されます:
(3) ここで、は元の剛性マトリックス()と、SUPORTでの変位を0にするためのSUPORT自由度での拘束を使用して計算されます。SUPORT自由度は、ユーザーが指定する(PARAM,INREL,-1に対して)ことも、OptiStructによって自動的に生成する(PARAM,INREL,-2に対して)こともできます。
- フリー-フリー構造のPARAM,INREL,-2:PARAM,INREL,-2がフリー-フリー構造に使用される場合は、デフォルトで代替手法が使用されます。この手法では、OptiStructがSUPORT自由度を自動生成する代わりにMPCを適用します。これにより、方程式は次のように変更されます:
(4) 式 4 は、との組み合わせで、慣性リリーフ後の変位が剛体モードと直交する()という追加要件です。その後で、このMPC拡張は次のようにさらに変更されます(方程式を無視):(5)
陽解法動解析
陽解法動解析は、時間依存荷重とともに時間依存の現象として実行されます。
入力ファイルのバルクデータセクションには、任意の数の荷重セットを定義できます。ただし、陽解法動解析(Radioss連携)で説明されているように、問題の解析にはサブケース情報セクションで選択されたセットのみが使用されます。各タイプの荷重を選択する方法は、関連するバルクデータステートメントの記述で指定します。
終了時間TTERMが定義される必要があります。サブケースはCNYNLSUBサブケース文を用いて連続的な荷重履歴として結合できます。それぞれの継続サブケースは前の(参照の)サブケースの終了時間と最後の荷重から開始されます。TTERMは、陽解法動解析について、全時間の項で定義されます(Radiossインテグレーション)。
荷重履歴の関数はTABLED1を用いて定義されます。
両方の定義について、DAREAまたはSPCDはそれぞれ、大きさの力、または、変位、速度、加速度を定義します。DAREAの他に、FORCE、MOMENT、PLOADおよびPLOAD4入力も荷重の大きさ定義に用いることができます。量とはスケールファクターです。
バルクデータセクションのNLOADカードでは、節点に直接かけられる荷重からなる荷重セットの線形組み合わせである荷重条件を定義します。組み合わせ荷重条件を適用するには、サブケース情報セクションで、NLOADの組み合わせのセット番号を選択します。
剛壁はRWALLを用いて定義できます。複数の剛壁セットはRWALADDを用いて1つのセットに結合されます。サブケース選択はRWALLで作られます。
ゼロ強制変位は、SPCまたはSPC1カードで指定できます。SPCADDステートメントを使用すると、異なるSPCの組み合わせセットが可能になります。
動的解析(陽解法と陰解法)では、初速度はTICおよびTICAバルクデータエントリを使用して定義できます。TICは節点上の初速度を定義し、TICAは節点セットのある軸方向(周り)の初速度を定義します。ICでサブケース選択される必要があります。
周波数応答の荷重および境界条件
周波数依存の動荷重が節点にかけられます。ここでは2つの異なる定義が利用可能です。
入力ファイルのバルクデータセクションには、任意の数の荷重セットを定義できます。ただし、周波数応答解析で説明されているように、問題の解析にはサブケース情報セクションで選択されたセットのみが使用されます。各タイプの荷重を選択する方法は、関連するバルクデータステートメントの記述で指定します。
両方の定義において、DAREA、FORCE、FORCE1、FORCE2、MOMENT、MOMENT1、MOMENT2、PLOAD、PLOAD1、PLOAD2、PLOAD4およびRLOAD、またはSPCDの組み合わせで、加振力または変位の大きさをそれぞれ定義します。DPHASE参照は位相角を、DELAY参照は遅れを定義します。式、、およびは、周波数に依存します。これらはTABLED1、TABLED2、TABLED3またはTABLED4を用いて定義されます。
強制移動にはSPCDを用いることが推奨されます。モーダル周波数応答解析において、古い手法であるラージマス法がEIGRAと共に用いられる場合、より良い精度のためPARAM,AMSESLMを用います。
載荷の周波数の範囲は、FREQ、FREQ1、FREQ2、FREQ3、FREQ4またはFREQ5バルクデータ文を用いて定義されます。
バルクデータセクションのDLOADカードでは、節点に直接かけられる荷重からなる荷重セットの線形組み合わせである静的荷重条件を定義します。組み合わせた荷重条件を適用するには、サブケース情報セクションにおいて、DLOADで組み合わせのセット番号を選択します。
ゼロ強制変位は、SPCまたはSPC1カードで指定できます。
SPCADDステートメントを使用すると、異なるSPCの組み合わせセットが可能になります。
動的荷重(DAREA)と静荷重(FORCE、FORCE1、FORCE2、MOMENT、MOMENT1、MOMENT2、PLOAD、PLOAD1、PLOAD2、PLOAD4およびRLOAD)の組み合わせがサポートされています。
過渡応答の荷重および境界条件
過渡動荷重は節点にかけられます。2つの異なる定義が利用可能です。
入力ファイルのバルクデータセクションには、任意の数の荷重セットを定義できます。ただし、過渡応答解析で説明されているように、問題の解析にはサブケース情報セクションで選択されたセットのみが使用されます。各タイプの荷重を選択する方法は、関連するバルクデータステートメントの記述で指定します。
TLOAD1およびTLOAD2バルクデータエントリは、時間依存性の荷重を定義します。
いずれの定義においても、適用される荷重(DAREA、FORCEx、PLOADxなど)、強制運動(SPC/SPCD)、または温度(TEMP/TEMPD)が振幅を定義します。DELAYステートメントは遅れを定義します。
DLOADバルクデータセクションエントリでは、節点に直接かけられる荷重からなる荷重セットの線形組み合わせである静的荷重条件を定義します。組み合わせた荷重条件を適用するには、サブケース情報セクションにおいて、DLOADで組み合わせのセット番号を選択します。
過渡初期条件は、TICバルクデータエントリを使用して定義します。初期変位および初速度が定義可能です。
SPCADDステートメントを使用すると、異なるSPCの組み合わせセットが可能になります。
動荷重と静荷重の組み合わせは、現時点ではサポートされていません。
強制移動にはSPCDを用いることが推奨されます。モーダル過渡応答解析において、古い手法であるラージマス法がEIGRAと共に用いられる場合、より良い精度のためPARAM, AMSESLMを用います。