接触
接触は、解析手法と最適化手法の不可欠な要素であり、物理的な構造とプロセスの挙動を理解、モデル化、予測、および最適化するために利用されます。
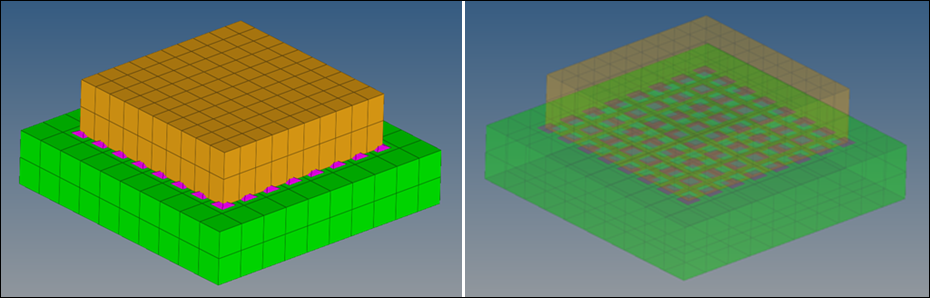
図 1.
OptiStructでは、接触アルゴリズムによってこれらのケースが自動的に処理され、さまざまなオプションを使用して接触インターフェース定義を制御できます。CONTACTおよびTIEバルクデータエントリを、PCONTバルクデータエントリ(必要な場合)と組み合わせて使用することで、一般にOptiStructのほとんどの接触ソリューションをセットアップできます。各種のCONTPRMパラメータを使用して、接触パラメータを変更および制御できます。SUPORTベースの高速接触ソリューションでは、接触を生成するためのSUPORTエントリ(オプションとして、ユーザー定義のMPC、SPC、およびSPOINT)をセットアップする必要があります。
接触の離散化
メイン(旧称“マスター”)サーフェスとセカンダリ(旧称“スレーブ”)サーフェスの間の接触は、3つの主要なアプローチを使用して構築できます。このプロセスは離散化と呼ばれ、接触条件を処理するために構築される接触要素の基本構造を定義します。
節点-サーフェス間の離散化
節点-サーフェス間の離散化アプローチでは、メインサーフェスをセカンダリ節点に関連付けする接触要素が作成されます。

図 2.

- 1つのセカンダリ節点

- 数個のメイン節点

- メイン節点が含まれた1つのメイン面

- セカンダリ節点からメイン面への1つの投影

図 3.
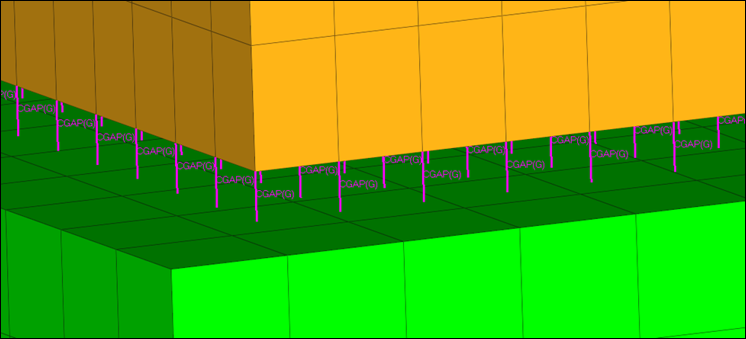
図 4.
- 微小変位解析の場合、N2S接触要素はCGAPGをコアとして使用して作成されます。
- 大変位解析の場合、N2S接触要素は非CGAPGコアで構成されます。
- 各N2S接触要素は、1つのスレーブ節点、いくつかのメイン点および1つのメイン面から成ります。
- 1つの接触インターフェース内で、セカンダリ節点は各N2S要素に固有のものでなければなりません。例えば、2つのN2S要素が同じセカンダリ節点で構成されていてはなりません。
- 1つの接触インターフェース内で、メイン面はN2S要素間で共有されていても構いません。

図 5. 特殊なケース - メインサーフェスがセカンダリ節点セットを包み込む
サーフェス-サーフェス間の離散化
サーフェス-サーフェス間の離散化アプローチでは、メインサーフェスをセカンダリサーフェスに関連付けする接触要素が作成されます。

図 6.
- 1つのコアセカンダリ節点
-

- “コア”セカンダリ節点を囲んでいるいくつかのセカンダリ節点

- セカンダリ節点を含んでおり、“コア”セカンダリ節点を共有している1つまたは複数のセカンダリ面
- 数個のメイン節点
- メイン節点が含まれた1つまたは複数のメイン面
- セカンダリ面からメイン面への1つまたは複数の投影
図 7.
- S2S接触要素ごとに“コア”セカンダリ節点が異なります(すなわち、各S2S接触要素は固有の“コア”セカンダリ節点を持ちます)。
- セカンダリ面は、複数のS2S接触要素間で共有されていて構いません。
- 異なるS2S接触要素が1つまたは複数のメイン面を共有できます。
- N2Sの場合は、より細かいメッシュをセカンダリとして使用することをお勧めします。
- S2Sでは、一般にN2Sよりも多くの計算時間とメモリリソースが消費されますが、一般に多くのケースでより滑らかな接触圧力を生成できます。
- セカンダリがGRIDのSETである場合は、N2Sを使用してください。
- セカンダリがソリッド要素のSETである場合は、N2Sをお勧めします。代わりに、ソリッド要素のサーフェスをS2Sのセカンダリとして使用することもできます。
- セカンダリまたはメインのサーフェスにコーナーが含まれている場合は、N2Sをお勧めします。代わりに、これらのサーフェスをより小さい滑らかなサーフェスに分割して、S2S接触のメインまたはセカンダリとして使用することもできます。
節点-節点間の離散化
節点-節点間の離散化アプローチでは、メインサーフェスをセカンダリサーフェスに関連付けする接触要素が作成されます。
メインサーフェスはGRIDセットを用いて定義されなければなりません。N2N接触には、メイン節点とセカンダリ節点を結合する内部的に生成されたRBEAM JOINTG要素が含まれます。CONTPRM,CONTOUT,YESが入力ファイル内で定義されている場合、JOINTG要素はfilename.n2n.femファイルに出力されます。このファイルは、接触のインプリメンテーションを視覚化するためにインポートすることが可能です。
接触のインプリメンテーション
接触要素内への接触インターフェースの離散化は、接触の効果をソリューションプロセスに組み込むための最初のステップです。
これらの接触要素にはその後、接触インターフェースの挙動を定義するために使用される属性が自動的に割り当てられます。これらの挙動としては、剛性に対する接触の効果、境界条件、FEAソリューション内の力マトリックスなどが挙げられます。以下のアプローチを使用できます。
ペナルティベースの接触
OptiStructにおけるほとんどの接触インプリメンテーションでは、ペナルティベースのプロセスが使用されます。
これは、CONTACT(必要な場合はPCONT)バルクデータエントリとTIEバルクデータエントリを使用してアクティブ化できます。TIE入力は、ペナルティベースの定式化とラグランジュ乗数ベースの定式化を両方ともサポートしています。節点-サーフェス間(N2S)とサーフェス-サーフェス間(S2S)の両方の離散化手法で、このプロセスを使用してパート間の接触がインプリメントされます。離散化された接触要素には、接触サーフェス間の近接度およびその要素上の接触力のタイプに応じて、可変剛性値(ペナルティ)が割り当てられます。この可変剛性値の主な目的は、接触サーフェスの貫通を最小化することです。

図 8. 線形解析におけるペナルティベース接触要素の力-変位曲線
線形ペナルティ曲線(非線形解析)
非線形解析の場合は、接触の状態は実行時に変化する可能性があるため、接触要素の剛性は、閉じている状態(KA)の値と開いている状態(KB)の値の間で切り替わる可能性があります。

図 9. 非線形解析におけるペナルティベース接触要素の力-変位曲線
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| PCONT | PID | GPAD | STIFF | MU1 | MU2 | CLEARANCE | SEPARATION | ||
| FRICESL |
非線形ペナルティ曲線(非線形解析)
前のセクションでは、線形ペナルティ曲線についての説明で、接触剛性は開いているときも閉じているときも一定のままであり、接触の状態が更新されたときにのみ変化すると述べました。
このことは、ごく一部のケースで、収束の困難さをもたらす可能性があります。その理由は、剛性変化が突然かつ非常に不連続的であるからです。接触の開閉する箇所で剛性変化をスムーズにするために、PCONTエントリ上のSTFEXP継続行とSTFQDRと継続行を通じて、非線形ペナルティ曲線を使用できます。現在では非線形ペナルティ曲線は、N2SおよびS2S接触の離散化のみに適用できます。
指数非線形ペナルティ

図 10. 指数非線形ペナルティ曲線には、3つの領域があります
C0とP0は、STFEXP継続行の対応するフィールドで指定されます。 Kfinal と<varname>C1</varname>は、C0、P0、およびSTIFFフィールドによって自動的に決定されます。
2次非線形ペナルティ

図 11. 2次非線形ペナルティ曲線には、4つの領域があります
- ALPHA1 = C1/(特性長さ)
- ALPHA2 = (C2 + C0)/(C1 + C0)
- ALPA3 = Kinitial/Kfinal
指数非線形ペナルティと2次非線形ペナルティの定義は、現在はFREEZE接触には適用できません。これらの定義は、線形解析における接触についても無視されます。
摩擦
実現象においては、ほとんどの接触をベースとしたシステムは、摩擦によって引き起こされたされたせん断応力によってさまざまな大きさの影響を受けます。摩擦効果が発生するのは、2つのサーフェスが接触して、互に接線方向に移動しようとする場合です。
これらのサーフェス間に存在する摩擦の量は、さまざまな要因による影響を受けます。摩擦は、接触している2つのサーフェスの性質(静止摩擦と運動摩擦の係数)と、接触インターフェースにおける垂直抗力の関数です。
これは有限要素解析における非常に非線形的な問題であるため、摩擦効果を含めることが問題を解析する上で重要な場合にのみ利用する必要があります。摩擦を伴うモデルでは、MUMPSソルバーが使用されます。2つのサーフェスが相互にスライドするときは、摩擦効果は非対称項を生じさせます。これらの項は、変位場全体に大きな影響を与える可能性があります。摩擦が指定されているときは、非対称ソルバー(MUMPS)がデフォルトで使用されます。この場合は、収束が遅くなる可能性がありますが、正確な結果が得られます。摩擦効果が大きくなると予想されない場合は、PARAM,UNSYMSLV,NOを使用してMUMPSソルバーを無効にできます。
摩擦をOptiStructの接触インターフェースに組み込むには、2つの方法があります。これらは、PCONTバルクデータエントリのMU1およびMU2フィールド(どちらかまたは両方)、またはCONTACTバルクデータエントリのMU1フィールドです。幾何学的非線形解析(Radiossインテグレーション)の場合は、PCONTX/PCNTX#エントリのFRICフィールドを使用できます。これらのフィールドが設定されていない場合は、CONTACT/PCONTのMU1フィールドの摩擦値が使用されます。

図 12.
摩擦モデル
- 固定勾配KTに基づくモデル
- 弾性すべり距離(FRICESL、v12.0で導入され現在のデフォルト)に基づくモデル

図 13. 接触要素のための2つの摩擦モデルの比較
- 固定剛性KTに基づくモデル(a)はやや単純で、非線形の摩擦のモデル化にはなお、ある欠点を持っています。即ち、Coulomb摩擦では、摩擦抵抗は法線方向力に依存します。固定のKTの使用は異なる固着 / すべりの境界を異なる法線方向力で予測し、これは同じ形状で固着またはすべりを、法線方向力で修正することになります。
- 弾性すべり距離に基づくモデル(b)は、固着またはすべりを単一に識別することが可能で、摩擦がある問題の解で一般的によりよいパフォーマンスを示します。このモデルでは、弾性すべり距離FRICESLを設定する必要があります。接触インターフェースについては、この値はすべてのメイン(旧称“マスター”)接触サーフェス上の標準的な要素サイズの0.5%としてOptiStructで自動的に計算されます。
モデル(b)は、これは現在のデフォルトで、摩擦を含む非線形問題の解法として推奨します。以前のバージョンとの一貫性から、固定KTに基づいたモデルは、PCONTエントリまたはCONTPRMエントリでFRICESL=0と設定することでアクティブになります。
スライディング接触の場合は、摩擦力は、常にセカンダリ(旧称“スレーブ”)とメイン(旧称“マスター”)が初めて接触した(ステータスが開いているから閉じているに変化した)ポイントの方向に向かいます。ポイントの位置は、現在位置と貫通前の最終収束解との間の比例補間を使用して推定されます。

図 14. CONTACT推定接触面

図 15. 摩擦を伴うCONTACTスライディング

図 16. CONTACT固着(ゼロスライディング距離)
実際には、最初から開いている接触インターフェースに対して、AUTOSPCが個別の未サポート回転を効果的に修正します。ただし、最初から閉じている接触要素(MORIENT=NORMALを持つ事前貫通の接触要素など)の場合は、摩擦項によってAUTOSPCが有効になりません。したがって、セカンダリ節点ごとに対応する回転方向のSPCを手動で適用する必要があります。
上記のデフォルト設定は、GAPPRM,GAPOFFSを使用して変更できます。
摩擦が存在すると、その強い非線形と非収束性のために、非線形収束が困難になる可能性があります。特にスライディングが存在する場合に顕著です。摩擦抵抗が問題の解決に不可欠であり、収束問題が発生している場合、固着条件の強制(KT > 0とMU=0の設定により)は、クーロン摩擦よりも良好な収束が得られる実用的な解となる可能性があります。ただし、これは最小限のスライディングが想定される問題にしか当てはまりません。スライディング量が多い場合には、固着条件を適用することによって“タンブル”モードを経て発散することがあります。
ラグランジュ乗数(MPCベース)
MPCベースの接触は、多点拘束(MPC)を使用してメインサーフェスとセカンダリサーフェスの間のタイド接触を定義します。

図 17.
- メインサーフェスとセカンダリサーフェスの間に物理的ギャップが存在する場合は、MPCベースのTIE接触解析の結果は正確でない可能性があります。このような場合は、6つの剛体モードは適切でないことがあります。
- MPCベースのTIE接触は、現在、MODCHGではサポートされていません。
- MPCベースのTIE接触は、現在、線形静解析、線形過渡解析、非線形静解析、および非線形過渡解析でサポートされています。微小変位非線形解析と大変位非線形解析の両方でもサポートされています。
高速接触(SUPORTベースおよびN2S接触ベース)
高速接触では、ペナルティベースのアプローチやSUPORTベースの接触とは異なる定式化が使用されます。
これを適用できるのは、モデル内の唯一の非線形性が接触に起因しており、かつモデルに含まれる変形やすべりが小さい場合です。
これは、大変位非線形解析(LGDISP)にも適用できません。OptiStructでは、高速接触へのアプローチが2つあります。
SUPORTベースの高速接触
モデル内の唯一の非線形性がパート間の接触であり、接触インターフェースにおける変形が微小変位領域内にある場合は、SUPORTベースの高速接触を使用し、SUPORTおよびPARAM,CDITERを用いて線形解析をセットアップすることができます。
接触要素は構築されないため、ペナルティベースの接触に本来付随する非線形性が回避されます。このプロセスでは、拘束が節点に適用されます。
パート間の貫通は、接触インターフェースにおける法線接触方向の相対変位成分を正の値に制限することによって回避されます。また、接触インターフェースにおける力も正の値に制限されて、引張り力が回避されます。
SUPORT+MPC接触の場合、このプロセスでは最初に、メインとセカンダリの位置にかかわらず、すべての接触は閉じていると想定されます。SUPORTのみの接触の場合、初期の接触状態はすべて開いています。その後、OptiStructによってこれらの拘束が反復プロセスに適用され、貫通と引張り力の両方が回避されます。DMIG, CDSHUTを使用して接触の状態を0.0(開)または1.0(閉)として表現する初期開始点を指定することもできます(CDSHUTはSUPORT+MPCにのみサポートされます)。
- すべり摩擦は使用できません。また、非線形材料および幾何学的非線形性は許可されません。
- 慣性リリーフをSUPORTベースの高速接触と組み合わせて使用することはできません。
- FASTCONTオプションを使った初期荷重 / 座屈またはCNTNLSUBを利用してのサブケースの継続は、サポートされていません。
MPC方程式のセットアップ
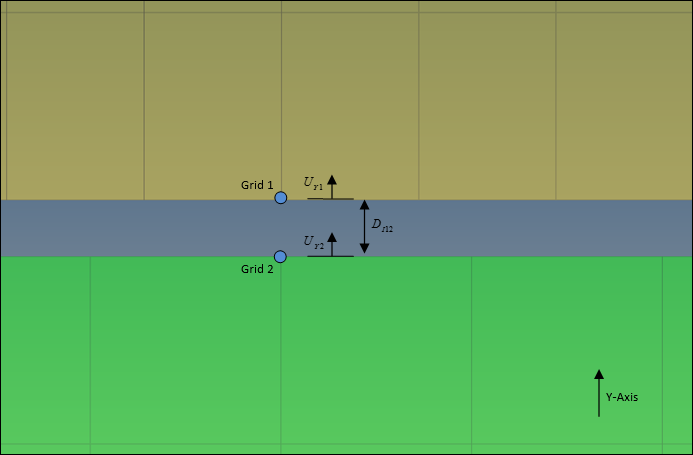
図 18.
MPC方程式
- Y軸方向の節点1と2の間の相対変位
- Y軸方向の節点1と2の間の初期接触ギャップ
- 正のY軸における節点1の変位
- 正のY軸における節点2の変位
とは元来モデル内では使用できないため、これらの量を表すためにSPOINTが作成されます。 は、SPOINTを介してSPCエントリに関連付けられ、初期接触ギャップの値はSPCエントリのDフィールドで設定されます。 は、SPOINT IDを介してSUPORTバルクデータエントリに関連付けられます。PARAM,CDPCHを使用して、高速接触解析後のDMIG,CDSHUTの最終状態の出力を制御できます。PARAM,CDPRTを使用して、高速接触解析の中間反復計算における違反の出力を制御できます。
例:入力デック
以下の入力デックは、2.35という初期接触ギャップで節点1と2を含むモデルのセットアップを例示しています。
$ 節点GRID,1,,5.0,0.0,0.0
GRID,2,,0.0,0.0,0.0$ SPOINT 接触ギャップ監視(D12)のためのSPOINT,10 $ SPOINT初期接触ギャップ値(DI12)のためのSPOINT,11$ SUPORT 接触ギャップ監視(D12)のためのSUPORT,10,0$ SPC初期接触ギャップ値(DI12)を指定するためのSPC,65,11,0,2.35$ MPC 制約条件を強制するMPC方程式を実現するためのMPC,75,1,2,-1.0,2,2,1.0
+,,10,0,1.0,11,0,-1.0$ PARAM, CDITER SUPORTベースの高速接触解析をアクティブ化するためのPARAM,CDITERN2S接触ベースの高速接触
N2S接触ベースの高速接触は、SUPORTベースの高速接触の代替となる高速接触アプローチです。
このアプローチの主な利点は、MPC方程式、SUPORT、およびSPCが必要ないことです。代わりに、接触インターフェースセットアップのプロセスは、非線形静解析の場合とまったく同じです。CONTACTバルクデータエントリを使用し、接触要素を生成するよう節点-サーフェス間(N2S)の離散化を使用して、接触インターフェースを定義できます(サーフェス-サーフェス間(S2S)の離散化は現在サポートされていません)。その後OptiStructは、新しい反復アプローチを使用して接触の状況を再度解析します。SUPORTベースの高速接触に当てはまる制限事項が、N2S接触ベースの高速接触にも当てはまります。また、摩擦が生じないスライディング接触のみが現在サポートされています。また、非線形材料および幾何学的非線形性は許可されません。
この接触をアクティブ化するには、あらかじめ定義された接触インターフェースが含まれたモデルにPARAM,FASTCONT,YESを追加するだけです。
初期ギャップの開口量は、PGAPカードのU0およびPCONTカードのCLEARANCEまたはCONTACTバルクデータエントリにより指定されます。
接触インターフェースのタイプ
接触インターフェースが生成され、接触要素が適切に離散化されて、接触のインプリメンテーションタイプが問題の要件に従って選択されたら、次のステップは接触インターフェースタイプを選択することです。これは、接触インターフェースでシミュレートされている挙動に依存します。
Tieインターフェース
Tieインターフェースは、2つのコンポーネントまたはパート間の接触面で相対運動を強制的にゼロにします。Tieインターフェースは、TIEエントリ(CONTPRM,TIE,MPCと共に)を用いてアクティブ化できます。詳細については、ラグランジュ乗数(MPCベース)セクションをご参照ください。
フリーズ接触
フリーズ接触は、接触面での相対運動をゼロに強制します。接触ギャップ開口量は元の値に固定され、スライディング距離は強制的に0となります。また、セカンダリ節点での回転はメインパッチの回転に合わせられます。FREEZE条件は、接触要素が開いているか閉じているかに関係なく、すべての接触要素に適用されます。フリーズ接触をアクティブ化するには、CONTACTエントリのTYPE=FREEZE、PCONTエントリのMU1=FREEZE、またはペナルティベースのタイド接触を使用します。ペナルティベースのタイド接触をアクティブ化するには、接触インターフェースのTIEエントリを使用します(デフォルトのCONTPRM,TIE,PENALTYを使用)。
スライディング接触
スライディング接触は、接触インターフェースにおいて垂直接触剛性のみを有しており、摩擦効果を有していません。この接触は摩擦が生じない小さなスライディングに対してのみ有効であり、開いている接触と閉じている接触の両方に適用されます。収束が困難になった場合は、小さい摩擦値を追加すると役に立つことがあります。またはSTICK条件を使用することもできます。スライディング接触をアクティブ化するには、CONTACTエントリのTYPE=SLIDEを使用します。
スティック接触
スティック接触は強制的な固着条件です。この場合、このような接触インターフェースはスライディングフェーズに入りません。これは閉じている接触のみに適用されます。スティック条件を効果的に強制するためには、摩擦オフセットを必要に応じてオフにします。スティック接触をアクティブ化するには、CONTACTエントリのTYPE=STICK、またはPCONTエントリのMU1=STICKを使用します。スティック接触の場合、接触剛性値(KT)は0.1*STIFFと等しくなります。
摩擦接触
詳細については、摩擦をご参照ください。
熱接触
詳細については、熱接触ソルバーをご参照ください。
高速接触
詳細については、高速接触(SUPORTベースおよびN2S接触ベース)をご参照ください。
接触インターフェースのパラメータ(接触の制御)
接触反発力の方向(MORIENT)
メインサーフェスからの接触反発力の方向は、CONTACTエントリのMORIENT フィールドで定義できます。これは、シェル要素またはグリッドパッチで構成されるメインにのみ適用されます。ソリッド要素に対して定義したメインは、このフラグに関係なく常に外向きの反発をかけます。MORIENTは、メインサーフェスがセカンダリ節点に作用する接触力の方向です。
注意すべき重要な点として、実際のほとんどの用途では、このフィールドを空白のままにしておけば、サーフェス法線の方向にかかわらず接触は適切に処理されます。MORIENTが必要になるのは、メインサーフェスがシェルまたは節点のパッチとして定義されており、合わせて初期貫通が発生している場合だけです。
- OPENGAP(TRACKがFINITE/CONSLIにセットされていない場合のデフォルト)では、初期状態でセカンダリとメイン間のギャップが開いており、セカンダリとメインの接触を接触条件で回避する必要があるという前提で押し出し方向が定義されます(押し出し方向の定義では、PCONTカードからのギャップのパディングであるGPADは無視されます。この方向は、メインおよびセカンダリ節点の位置に厳密に基づきます)。

図 19. OPENGAPの例 - OVERLAPでは逆の内容、つまり、セカンダリメインのボディがすでに重なっており、これらを接触条件で引き離す必要があるということが前提です(これは、セカンダリセット全体がメインオブジェクトを事前に貫通するモデルの場合に便利です)。

図 20. OVERLAPの例 - NORMオプション(TRACK=FINITE/CONSLIのデフォルト)を使用する場合、反発力の方向はメインサーフェスへの法線ベクトルの方向です(メインSURF定義にFLIPフラグがある場合は、サーフェス法線がシェル要素へのデフォルト法線と反対向きになる場合があります。この動作は、HyperMeshのcontactsurfsパネルのreverse normalsチェックボックスの動作に相当します)。セカンダリ節点がメインサーフェスへの直接的な法線投影を持たず、“最短距離”の投影が使用される場合(GAPPRMカードでGAPGPRJ set to にSHORTを設定した場合)、反発力の方向は最短距離の線分の方向になると同時に法線ベクトルとも一致します。

図 21. NORMの例 - REVNORMは、NORMオプションと反対方向の反発力を発生させます。
デフォルトでは、MORIENTはソリッド要素上で定義されているメインには適用されません。このようなメインでは、常に外方向への反発力がかかります。これは、CONTPRM,CORIENT,ONALLを選択してMORIENTの適用範囲をすべての接触面に広げることによって変更できます。この場合、ソリッド要素上のサーフェスのメインSURF定義にFLIPフラグが表示され、サーフェス法線が外向きになる場合を除き、デフォルトの法線は内向きになることに注意してください(HyperMeshで接触面を作成する場合、この動作はcontactsurfsパネルのreverse normalsチェックボックスの動作に相当します)。
探索距離(SRCHDIS)
CONTACTエントリとTIEエントリのSRCHDISフィールドは、接触インターフェースを作成するための探索距離基準です。指定すると、メインサーフェスからSRCHDISの距離以内にあるセカンダリ節点でのみ接触条件がチェックされます。
デフォルト値は、メインサーフェスの平均エッジ長の2倍です。FREEZE接触の場合、デフォルト値は平均エッジ長の半分です。
シェル要素の場合、接触と結合の探索は、シェル板厚を考慮します。すなわち、定義された探索距離は、互いに向かい合うシェルサーフェス間の真の距離であることが期待されます。例えば、オフセットなしのシェルの場合、互いに向かい合う2つのシェルサーフェス間の幾何学的な距離が5.0、シェル板厚はそれぞれ2.0である際、互いに向かい合うシェルサーフェス間の実際の距離は3.0です。探索距離フィールドが3.0に設定されると、接触は期待されるように生成されます(このシナリオでは、SRCHDISが3.0より低く設定されている場合、接触は生成されません)。
接触調整(ADJUST)
- NO
- 調整なし(デフォルト)。
- AUTO
- メインサーフェス上の平均エッジ長の5%に等しい実数値が深さ基準として内部的に割り当てられます。
- 実数 > 0.0
- (接触要素が作成された)セカンダリ節点に対する検索が実行されるゾーンを定義する深さ基準の値。その後、これらのセカンダリ節点(接触要素が作成されている)がメインサーフェス上で調整されます。割り当てられた深さ基準は、押し出し方向の検索ゾーンを定義するために使用されます。
- 整数 > 0
- TYPE=GRIDのSETエントリの識別番号。このSETにも属するセカンダリエンティティ上の節点のみが、調整用に選択されます。
セカンダリ節点の位置調整では、モデルにひずみは生成されません。DISCRET=N2Sを選択した場合は、初期モデル形状の変更として扱われます。DISCRET=S2Sを選択した場合は、初期接触開口 / 貫通の変更として扱われます。
セカンダリエンティティ上の節点がメインサーフェスの投影ゾーンの外に位置する場合、それに対して接触要素は構築されていないため、調整時には常に無視されます。
接触インターフェースパディングのGPAD(PCONTエントリ)を使用して、セカンダリ節点の調整の方向と距離は指定されます。GPADは、調整のために検索ゾーンを補強するためにも使用されます。MORIENTフィールドがOPENGAPまたはOVERLAPであり、参照されているPCONTエントリのGPADフィールドがNONEまたは0である場合、節点の調整はスキップされます。これは、OPENGAPまたはOVERLAPに対して、セカンダリ節点が厳密にメイン面上に位置するように調整されると、メイン押し出し方向を判断する方法がないためです。
- 自己接触に対しては、ADJUSTフィールドをNOに設定する必要があります。
- ADJUSTフィールドに対して実数値(調整に対する検索深さ基準)を入力すると、調整に対する検索ゾーンが定義されます。GPADも定義されている場合、GPADの値はADJUST の検索範囲を拡大します(下図のGPADの図参照)。接触要素が作成されている、この検索ゾーン内のセカンダリ節点が調整されます。ADJUSTがSRCHDISより大きいか等しい場合、接触要素が作成されたすべてのセカンダリ節点位置が調整されます。

図 22. 接触インターフェースパディング(GPAD)を使用しない場合
図 23. 接触インターフェースパディング(GPAD)を使用する場合注: 上図に示すように、拡張用に検索ゾーンを定義するために、深さ基準(ADJUSTに対する負でない実数値)を使用します。GPADが定義されている場合は、上の画像のようにADJUSTの検索ゾーンを拡張するためにもGPADの値が使用されます。この検索ゾーンは、ADJUSTフィールドの値と等しい距離まで、押し出し方向に作成されます。検索ゾーン内のセカンダリ節点(接触要素が定義されている)が、このセクションで指定されている規則に基づいて、調整時に考慮されます。 - ADJUSTフィールドを整数値(節点SETエントリの識別番号)に設定すると、セカンダリエンティティと節点SETにより共有されている節点で接触の作成がチェックされます。つまり、これらの節点についてはSRCHDISは無視され、投影が検出されると位置が調整されます。節点SETに属するがセカンダリエンティティには属さない節点は単に無視されます。
接触のクリアランス(CLEARANCE)
クリアランスは、CONTACTエントリまたはPCONTエントリのCLEARANCEフィールドで定義できます。PGAPエントリのU0でも定義できます。クリアランスによって節点が物理的に移動されることはありません。2つのサーフェス間のクリアランスが指定されたクリアランス以下の場合は、節点の物理的な位置にかかわらず、接触は閉じていると見なされます。サーフェスの節点が非常に不規則でないこと、およびサーフェスの一部(またはすべて)のパート間の実際の物理的距離が指定されたクリアランスを大幅に上回っていないことを確認してください。これらに該当する場合は、各反復計算後にまたはソリューション全体にわたって実際の物理節点に適用される接触パラメータは、正確でない可能性があります。空白のクリアランスフィールドは、U0=AUTOと同じ意味です。
CLEARANCEを使用すると、セカンダリとメインの間の実際の距離からの初期ギャップの計算でのデフォルトの接触挙動を上書きします。CLEARANCEは、閉じた接触とするために、セカンダリとメインが移動する必要がある距離に等しくなります。負のCLEARANCEの値はボディが初期貫通を持つことを示します。
- CONTACTエントリのCLEARANCEを、PCONTエントリのPIDと共に使用することはできません。この場合は、PCONTエントリでクリアランスを指定する必要があります。
- CLEARANCEの存在下でのSRCHDISの考慮は、システムの設定(SYSSETTING)内のSRCHDCLRまたはSolver コンフィギュレーションファイル(.cfg)ファイルでコントロールすることができます。
接触のスムージング(SMOOTH)
- SMSIDEがMAINであり、SMREGがALL(またはMSIDと同じ)である場合は、メイン側のスムージングを定義するためのSMOOTH継続行が1つだけ存在する必要があります。
- SMSIDEがSECONDであり、SMREGがALL(またはSSIDと同じ)である場合は、セカンダリ側のスムージングを定義するためのSMOOTH継続行が1つだけ存在する必要があります。
- SMSIDEがBOTHである場合は、SMREGはALLである必要があると共に、SMOOTH継続行が1つだけ存在する必要があります。
- N2SおよびS2S接触の両方について、スムージングがサポートされるようになりました。
有限スライディング(TRACK)
現時点では、有限スライディング(TRACK=FINITEまたはCONSLI)オプションがサポートされるのは、TYPE=SLIDEである場合、または摩擦(MU1/CONTPRM/PCONTを使用)が定義されている場合のみです。
TRACK=FINITEの場合、接触の検索は荷重ステップ毎に行われ、一方、TRACK=CONSLIの場合、検索は反復計算毎に行われます。CONSLIオプションは、より正確な結果を生み出すことが期待され、特に非常に大きいスライディングおよび / またはひずみが存在する際は、より高い収束のロバスト性が期待されます。
非ソリッド要素の場合は、有限スライディング(FINITE/CONSLI)についてMORIENTフィールドをOPENGAPやOVERLAPに設定してはいけません。CONTPRM,CORIENT,ONALLがアクティブな場合は、MORIENTはソリッド要素に適用されます。このような場合は、ソリッド要素についてもMORIENTをOPENGAPやOVERLAPに設定してはいけません。
- 有限スライディング(FINITE/CONSLI)が大変位非線形解析に対してのみ有効である。
- 有限スライディング(FINITE/CONSLI)がハッシュアセンブリおよびMUMPSソルバーとの組み合わせでのみ機能する。大変位非線形解析の場合は、ハッシュアセンブリ(PARAM,HASHASSM,YES)が自動的にオンにされます。
- 自己接触の場合、有限スライディング(CONSLIのみ)はサポートされます。
接触インターフェースのパディング(GPAD)
シェルの厚みなど追加の層を考慮するためのインターフェースの“パディング”。この値が、節点の位置から計算された接触ギャップ開口量から減算されます。これは、CONTACTエントリとPCONTエントリのGPADフィールドで設定します。CLEARANCEは、(0でない)GPADと共に設定することはできません。空白のGPADフィールドはCLEARANCEがある場合、NONEと解釈されます。
初期接触ギャップ開口量は、セカンダリおよびメイン節点の相対的な場所に基づいて自動的に計算されます(変形前のメッシュ内)。メインおよびセカンダリオブジェクトをカバーする追加の材料層を考慮するために、GPADエントリを使用できます。GPADオプションのTHICKを指定すると、メインやセカンダリがシェルサーフェスである場合は(シェル要素タイプのSETまたはシェル要素面のSURF)、自動的に接触インターフェースの両側のシェル厚が考慮されます(これにはシェル要素オフセットZOFFSまたは複合材オフセットZ0の影響も含まれます)。接触インターフェース内のメイン / セカンダリとしてシェルが選択されている場合は、THICKオプションでは、自動パディングのみが適用されます(例えば、接触インターフェース内のメイン / セカンダリとして選択された“スキン”ソリッド要素に対しては、パディングは適用されません)。
接触の安定化(CNTSTBエントリとPARAM,EXPERTNL,CNTSTB)
サーフェス-サーフェス間接触と大変位の節点-サーフェス間接触の安定化を制御するためのパラメータを定義します。CNTSTBバルクデータエントリは、特定のサブケースで適用されるCNTSTBサブケース情報エントリによって参照される必要があります。また、PARAM,EXPERTNL,CNTSTBを使用して接触の安定化を適用できます。
初期貫通の解決(CONTPRM,SFPRPEN)

図 24.
上のケースでは、セカンダリ節点が、実際には同じソリッドボディの反対側にあるにもかかわらず、メイン面に初期貫通を起こしているように見なされます。非線形のCONTACTソリューションではボディのこのような部分は“絞り上げ”られて厚さがゼロとなり、結果として明らかに非常に高い応力となります。
可能性のあるセカンダリとメインのセットを正しく同定することの他に、このような状況を避けるために可能な改善法として、自己接触サーフェスで囲まれているソリッドボディの SRCHDISを最小板厚より必ず小さくする方法があります。
接触と親和性のある要素(CONTFEL)
接触と親和性のある要素は、PARAM,CONTFEL,YESを使用してアクティブ化できます。接触と親和性のある要素としてTETRA10、HEXA20およびPENTA15が用意されており、これらを単一のモデルで組み合わせて使用できます。接触と親和性のある要素を使用した実行を改善するために、変更された形状関数が使用されます。
非分離接触(SEPARATION)
接触が閉じられた後、メインおよびセカンダリが分離し得るかどうかを示すフラグ。これは、PCONTバルクデータエントリ上でSEPARATIONフィールドを介して設定されます。SEPARATIONがNOに設定されると、、メインおよびセカンダリは接触が閉じられた後は分離しません。S2Sの摩擦SLIDEおよびSTICK接触または大変位N2Sにのみ適用されます。
自己接触
- メインおよびセカンダリブセットID番号が同じセットを指している。
- メインセットID番号が空白。
- 大きな変形後にサーフェスがそれら自身と接触する(たとえば、大規模な座屈変形)。そのような場合、一部の材料がそれ自体と衝突する可能性があり、どのパートが接触するかを決定するのが困難です。
- 接触する可能性のあるペア(メイン-セカンダリ)が多数存在し得る際は、それらをすべて手動で定義することは可能ではありません。
- 何らかの理由で手動による接触の設定が上手くいなかい場合、自己接触を試すことができます。
- モデルには複数領域の自己接触を含まれることが可能です。
- モデルの別の領域には、同じモデルが通常の接触/TIEがあってかまいません。
- 現時点では、継続スライディング(CONSLI)のみがサポートされています。N2SおよびS2S接触は共に、自己接触で使用可能です。
特殊な接触の適用
接触の各種プロパティと実装に基づいて、OptiStructでは、以下の特殊なまたは専用の接触の適用が可能です。
プリテンションボルト解析
接触投影のメイン面に、いずれかのプリテンションカッティングサーフェス上の節点が含まれている場合は、接触を考慮するためこの接触投影が含まれます。詳細については、ユーザーズガイドのプリテンションボルト解析をご参照ください。
ねじ山ボルト
ねじ山ボルトは、CLEARANCEフィルードをCLRNCバルクデータエントリ参照に設定することで、CONTACTインターフェースの一部として指定できます。詳細については、CONTACT / CLRNCバルクデータエントリをご参照ください。
接触インターフェース
接触インターフェースは、初期接触貫通を解決する方法を制御します。接触のあるサブケースの場合、自動的にオンになります。このような初期接触貫通を解決するには、CNTITFサブケースとCNTITFバルクデータエントリを使用します。
接触を伴う最適化
接触が存在する場合の最適化には、すべての最適化タイプとすべての応答が(適用可能な場合)使用可能です。トポロジー、トポグラフィー、寸法、形状、フリー形状、およびフリー寸法という最適化タイプがすべてサポートされています。大きな形状変化を伴うフリーズ接触を最適化に使用できます。
- 初期貫通が原因で、一部の接触については負のコンプライアンスが生じることがあり、この結果として、全体コンプライアンスに負の寄与がもたらされることがあります。
- 負のコンプライアンスが伴う場合は、最適化はできません(接触はエネルギーを保存する代わりに放出しています)。
- コンプライアンス計算に対するCONTACT/GAP要素の寄与をオフにするには、GAPPRM,GAPCMPL,NOを使用します。
- 負のクリアランスを伴う接触は、初期貫通を解決するように再定義できます。
- ADJUSTを使用して接触インターフェースを変更することで、これらの貫通をスムーズにできます。
初期荷重を伴う接触
非線形接触解析では、初期荷重効果を考慮に入れることができます。周波数抽出または線形静的サブケースでSTATSUB(PRELOAD)を使用して、非線形静的サブケースからの初期荷重に起因する初期応力および荷重剛性効果が考慮されます。初期荷重ではプリテンションサブケースも考慮できます。このようなケースでは、S2S接触のみがサポートされます。初期荷重サブケースには、CNTNLSUBは必要ありません。詳細については、ユーザーズガイドの初期応力線形解析をご参照ください。
接触解析の出力
CONTFという入出力オプションおよびサブケース情報エントリを使用して、すべての非線形解析サブケースまたは個別の非線形解析サブケースそれぞれの接触結果出力を要求できます。
NLOUTエントリは、非線形解析からの増分出力を要求するために使用することができます。また、NLOUTエントリがモデル内で指定されている(加えてサブケース内で参照されている)場合、OptiStructはデフォルトで、大変位非線形解析、ひずみエネルギーおよび接触安定化エネルギーについて、HyperGraphでプロットが可能であるデータファイルに出力します。HyperGraphメインファイルはfilename_nlm.mvw、HyperGraphデータファイルは(ASCIIフォーマットで)filename_e.nlmと名づけられます。
関連項目:
OS-T:1360 接触するガスケット材料のNLSTAT解析
OS-T:1390 ヘッドボルトで接合されたエンジンシリンダーヘッド、ガスケット、エンジンブロックシステムの1次元および3次元プリテンションボルト解析