プリテンションボルト解析
多くのエンジニアリングのアセンブリはボルトを用いて結合されており、通常、実働荷重が与えられる前にプリテンションが加えられています。
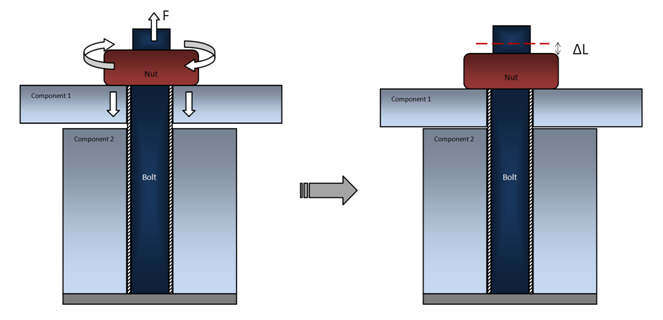
図 1. プリテンショニングされたアセンブリ – プリテンショニング荷重の適用(Step 1)
Step 1では、構造物の組み立ての最初にそれぞれのボルトがナットで締めつけられますが、これは通常、規定のトルクに従って行われます(これは、ねじ山のピッチによって、規定の引張り力に変換されます)。
結果として、ボルトのある作業対象パートは距離だけ短くなります。この距離は作用した力と、プリテンションを受けるボルトとアセンブリのコンプライアンスに依存します。
- プリテンショニングは、使用されている構造からボルトの一定の長さを取り除くことで、ボルトの締め付け部分を短くします(現実的には、このセグメントはナットを介してスライドしますが、総合的な効果はボルトの作用長さの短縮です)。ボルトは伸長するため、より小さくなったボルト材料の有効長はボルトのマウントからナットまでの距離に及びます。
- 適用される力のために、各ボルトの短縮の計算には、プリテンショニングフォースのかかったモデル全体のFEAソリューションが必要となります。これは、与えられた荷重に対するナットの移動量はボルトのコンプライアンス、ボルトのあるアセンブリのコンプライアンスに依存し、プリテンションを受ける複数のボルトの間の相互作用にも影響を受けるためです。
Step 1の最後に、各ボルトの短縮量が、プリテンショニング過程中に達した位置に単にナットを残すことで定められ、“ロック”されます。
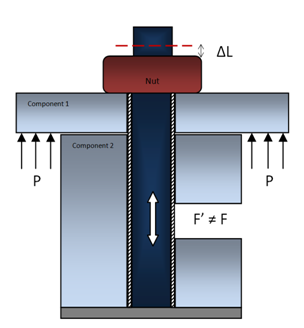
図 2. プリテンショニングされたアセンブリ – “ロック”されたボルトの短縮と荷重の適用(Step 2)
適用のバリエーション
実際には、プリテンション荷重の適用は多様で、上のプリテンションよりも複雑な順序であるかもしれません。例:
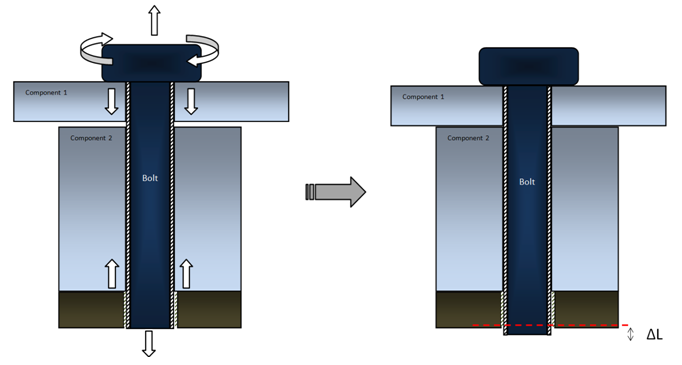
図 3. プリテンション荷重適用の別のアプローチ
この場合、ボルトの作用パートの短縮される量(材料の削除)はボルト-ナットのインターフェースではなく、ベースのねじ山の中で起こります。ただし、最終的な力学的効果は同じです。
場合によっては、トルク / 力によりプリテンションは規定量で “増し締め”され増加されます。これは、プリテンション力により、の上部に、規定の回数の増し締めとねじ山のピッチに応じて付加的な'が加わることを意味します。
通常、自動化された組立工程では、全てのボルトは同時にプリテンションを受けます。しかし、場合によっては、特定の順序、あるいはグループ単位でプリテンションが起こります。このような場合、既にプリテンションを受けたボルトのが“ロック”されている間、続くプリテンション力が次の一群のボルトに作用され、次のステップで“ロック”されます。
プリテンションを受けるFEAソリューション
構造解析では、FEAモデルは材料参照フレームで定義され、構造が伸びて変形している間、材料の量は一定で固定であると仮定されます。
しかし、プリテンションの場合、モデルの実際の作用パートでは、ナットの移動によりいくらかの材料が削除されます(通常ボルトのはみ出した部分は、構造の力の釣り合いに寄与しないため、作業FEAモデルに含まれません)。
OptiStructにおけるこの現象のシミュレーションは下に示したアプローチに従います:
- 1次元ボルトプリテンショニング
- 3次元ボルトプリテンショニング
多点拘束(MPC)は1次元および3次元プリテンショニングの両方で使用されます。2つのインプリメンテーションの違いは、MPCを介して作成およびコントロールされる複製節点の数です。
1次元ボルトプリテンショニング
ボルトまたは選択された断面は、単一または複数の1次元要素(ビームまたはロッド)によって表されます。
Step 1
- 最初に、架空の断面がビームに導入され(これはPRETENSIONコマンドを含むサブケースで内部的に自動で行われます)、断面の位置に2つの複製の節点が作成されます。
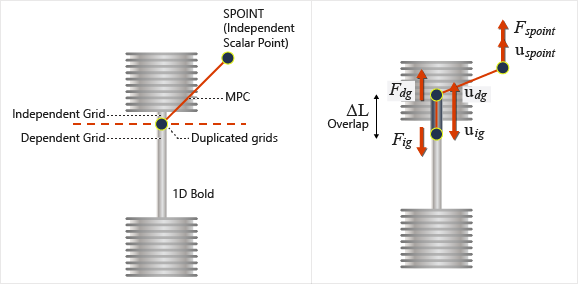
図 4. 1次元要素を使用して1次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーションさらに、スカラーポイント(SPOINT)が自動的に作成され、独立した節点として機能します。自己釣り合いのプリテンション力のペアが、新しく作成されたSPOINTを通して切断面の両端に適用されます。指定されたプリテンション力はSPOINTに内部的に適用され、MPCを介して複製節点に伝達されます。MPCは、次の方程式に基づいて、新しく作成された複製節点とスカラーポイントの移動をコントロールします:(1) ここで、- 独立したスカラーポイント(SPOINT)の変位
- 従属した節点の変位
- 独立した節点の変位
強制変位によるスカラーポイント上の反力は、従属節点または独立節点に作用する力と等価として示すことができます。
または(力の方向によって決まる)。
ここで、- 右記の強制変位による独立スカラーポイント(SPOINT)上の反力;
- 従属節点に作用する力
- 独立節点に作用する力
- これらの力(およびこのサブケースで参照される他の荷重)が適用され、構造の変形を計算するために静解析が実行されます。これらの解析の結果にはビームの切断部分に“オーバーラップ”が生じ、これは図 1のボルトのナットに対する相対移動量と等価です。
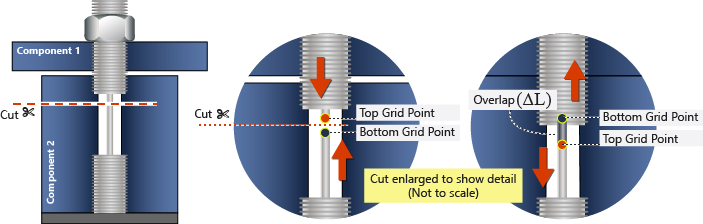
図 5. 1次元要素を使用して3次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション(Step 2)
Step 2
図 5に示したように、ステップ1で計算されたオーバーラップ量はボルト長さから削除され、次にボルトは切断位置で再結合されます。これはナットが締められたプリテンションを受けるボルトの短くなった作業長さを表します(力学的には、これはDEFORMコマンドの効果と同様です)。

図 6. 2次元要素を使用して3次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション(Step 2)
3次元ボルトプリテンショニング
3次元ボルトプリテンショニングでは、3次元ソリッド要素を使用してボルトが表現(メッシュ)されます。ビームにおける横方向の面は切断される向きに沿って識別され(断面)、複製節点が多点拘束(MPC)とSPOINTによってコントロールされて、プリテンショニングの効果がシミュレートされます。
Step 1
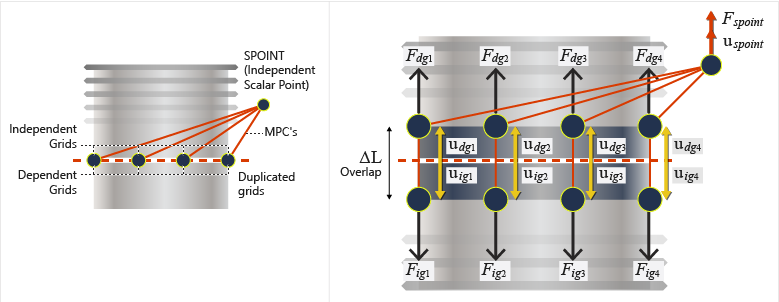
図 7. 3次元要素を使用して3次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション(プリテンション方向)
さらに、スカラーポイント(SPOINT)が自動的に作成され、独立した節点として機能します。自己釣り合いのプリテンション力のペアが、新しく作成されたSPOINTを通して切断面の両端に適用されます。指定されたプリテンション力はSPOINTに内部的に適用され、MPCを介して複製節点に伝達されます。MPCは、次の方程式に基づいて、新しく作成された複製節点とスカラーポイントの移動をコントロールします:
- 独立したスカラーポイント(SPOINT)の変位
- 番目の従属した節点の変位
- 番目の独立した節点の変位
- 番目の独立した節点の変位
- プリテンション方向に垂直な番目の従属節点の変位
- プリテンション方向に垂直な番目の独立した節点の変位
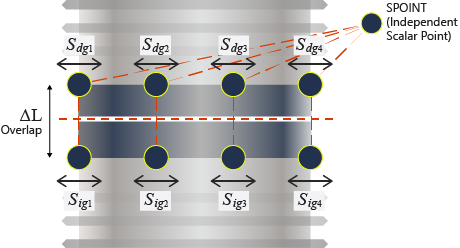
図 8. 3D要素を使用して3Dボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション. (プリテンション方向に対して垂直)
- 右記の強制変位による独立スカラーポイント(SPOINT)上の反力;
- 番目の従属節点に作用する力
- 番目の独立した節点に作用する力
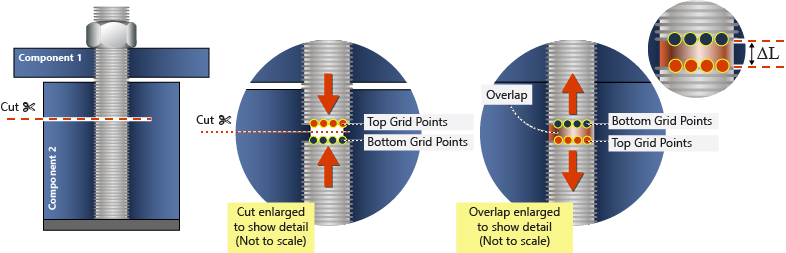
図 9. 3次元要素を使用して3次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション(Step 1)
Step 2
図 5に示したように、ステップ1で計算されたオーバーラップ量はボルト長さから削除され、次にボルトは最初の断面で再結合されます。これはナットが締められたプリテンションを受けるボルトの短くなった作業長さを表します。(力学的には、これはDEFORMコマンドの効果と同様です。)
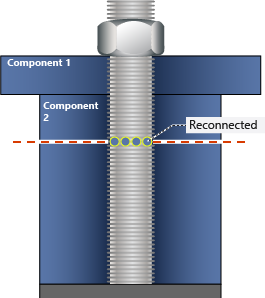
図 10. 3次元要素を使用して3次元ボルトに適用されるボルトプリテンショニングのFEAインプリメンテーション(Step 2)
プリテンションを受けるアセンブリの解析
プリテンションを含む問題の求解は、線形または非線形の静解析サブケースの標準的な順序に合致します(ステップ2、構造のプリテンション解析は、固有振動数、周波数応答、座屈、過渡サブケースでも利用可能です)。
それぞれのユーザー入力は、バルクデータエントリセクション内でのプリテンションを受ける断面、荷重と調整量、加えてサブケース情報エントリセクションでのプリテンション順序の指定を必要とします。利用可能なコマンドの概要を以下に示します。各コマンドの詳細については、それぞれのカードの説明を参照してください。
バルクデータエントリセクション
- PRETENS
- プリテンション断面を定義します。現在、これはそれぞれの1D要素を指定します。
- PTFORCE
- プリテンション力F (実際の力のペア)の定義し、それぞれのプリテンション断面を割り当てます。
- PTFORC1
- 複数のプリテンション断面に力を割り当てる単純化フォーマットです。
- PTADJST
- 引張りの調整量‘ を定義し、それぞれのプリテンション断面を割り当てます。
- PTADJS1
- 複数のプリテンション断面に1つの調整量を割り当てる単純化フォーマットです。
- PTADD
- 複数のプリテンション力または調整量を1つの荷重IDに結合します。
- PRETPRM, INILOAD
- 詳細については、パラメータページをご参照ください。
- PRETPRM, PRTSW
- 詳細については、パラメータページをご参照ください。
サブケース情報エントリセクション
- PRETENSION
- この静解析サブケースでプリテンション力 / 調整量をアクティブにします(上で記したステップ1に対応します)。
- STATSUB (PRETENS)
- プリテンションボルトを生成したサブケースを指定し、現在のサブケースに取り入れられます(上で記したステップ2に対応します)。
PRETENSIONとSTATSUB(PRETENS)が同じサブケースにあることも可能です – これは、より複雑なプリテンション順序を模擬するために用いることができます。
例:典型的なフロー
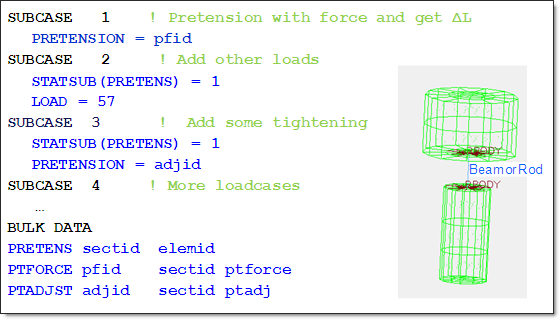
図 11. プリテンション解析の典型的なフロー
コメント
プリテンションをサポートするサブケース
プリテンションステップ 1と2は静的FEA問題の求解を必要とします。そのため、PRETENSIONとSTATSUB(PRETENS)コマンドは、線形またはデフォルトがNLSTATタイプの非線形静解析でのみ使用できます。
他のタイプのサブケースでのプリテンションの参照
プリテンションはFEAモデルに応力を作り出すため、非線形幾何剛性効果を通して、構造の静的または振動応答に、プリテンションボルトの固有振動数の増加のような影響を与えることができます。このような幾何剛性効果は、静的、固有振動数、および周波数応答サブケースで利用可能なSTATSUB(PRELOADコマンドで与えられます。プリテンションのある問題では、STATSUB(PRELOAD)プリテンションサブケース、または参照プリテンションに続く任意の静的サブケースを指定可能です。プリテンション(およびそのようなサブケース内での他の荷重)で生成された応力がそれぞれのプリロードとして用いられます。
プリテンションサブケースの順序
PRETENSIONとSTATSUB(PRETENS)のあるサブケースは、順番またはグループ単位で行われるボルト締めの様な、さまざまな順序のプリテンションを生成するために用いることができます。
1つのプリテンション断面(1D ボルト)は、力によるボルト締めに続く付加的な規定量の距離の調節(ナットの増し締め)のような連続で累積的なプリテンションを受けることができます。このような累積的な例は上の単純な図に示されています。
同じセクションでのプリテンションのサブケース順序特有のルールを以下に示します:
- 同一サブケース内でSTATSUB(PRETENS)が定義されている状態で、一部のボルトにプリテンション力(PTFORCE)が付与されている場合、PTFORCEが付与されているボルトはSTATSUB(PRETENS)の影響を受けません。
- プリテンションの調整(PTADJST)は与えられた断面に対して任意のプリテンションサブケースでアクティブ化可能です。調整の効果はそれぞれのSTATSUB(PRETENS)で参照されるそれぞれの前のサブケースで達した状態に対しての累積となります。
非線形の経路依存の問題では、このプリテンションの順序は非線形サブケースの継続と組み合わせて用いることができ、これはサブケースコマンドCNTNLSUBとの任意の組み合わせになります。任意の荷重順序に対し、STATSUB(PRETENS)がプリテンションステップの順序を制御し、CNTNLSUB非線形の観点から(塑性、摩擦のある接触など)順序を制御します。