Engineのエラーメッセージ
MASS OR ENERGY ERROR DUE TO CONTACT
**WARNING MINIMUM TIME STEP 0.248E-04 IN INTERFACE 11(DTMIN= 0.2500E-04)
REMOVED SECONDARY NODE 63086879 FROM INTERFACE
MESSAGE ID : 206
** RUN STOPPED : ENERGY ERROR LIMIT REACHED
*** NODE WITH HIGHEST MASS CHANGE概要:
いくつかのケースでは、接触の時間ステップを一定に保つために過大な質量が追加されるため、シミュレーションが失敗し、ERROR終了することがあります。
接触の安定性を維持するために、なぜ質量を追加する必要があるのでしょうか?
- /DT/NODA/CST、/DT/NODA/CST2、または/DT/INTER/CSTが使用されている場合、時間ステップは一定です。
- インターフェースの時間ステップは次のように計算されます:
剛性は、貫通量 に応じて増大します。
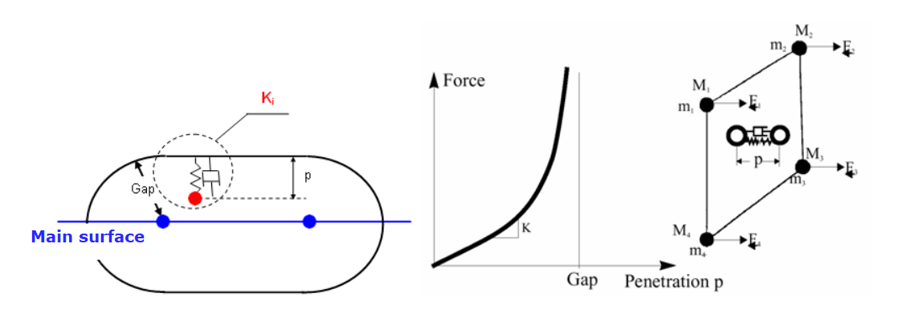
図 1.接触内の貫通量が増大するにつれ、剛性の増大によって、時間ステップを一定に保つため質量が増加します。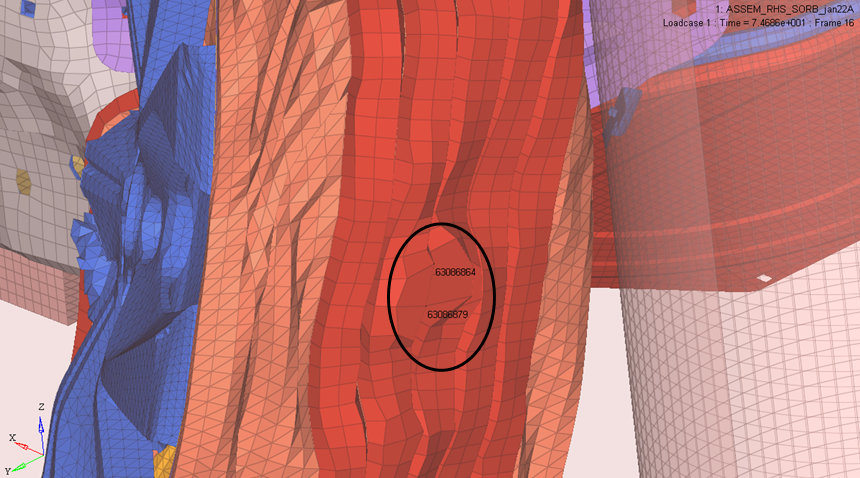
図 2.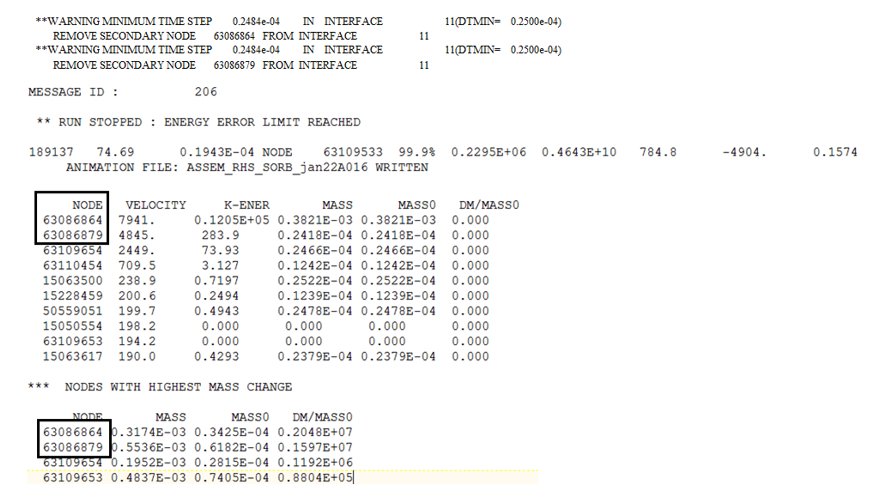
図 3.たとえば、タイヤは剛性バリアと重なっています。タイヤの背後では、ブレーキディスク(またはキャリパー)によってタイヤがバリアに押し付けられます。全体接触は剛性が不十分であるため、大きな貫通を生じさせます。- 剛性の増大
- 時間ステップを一定に保つために質量が追加される
推奨される解決策:
この問題の一般的な解決策は、ギャップと剛性を増大させた局所接触を作成することです。初期剛性を増大させると、貫通初期の時間ステップは小さくなりますが、貫通が大きくなった場合にはこの時間ステップが大きくなります。
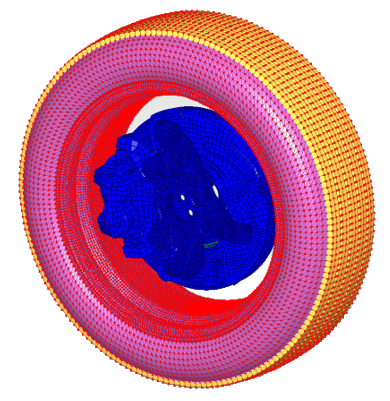
図 4. 局所接触
図 4. 局所接触
2つの剛体パート間の接触は、インターフェースTYPE7とTYPE11またはTYPE19を使用して実現できます。主な問題は、この接触で深い貫通が生じることです。その結果として、時間ステップを/DT/NODA/CSTまたは/DT/NODA/CST2で指定された値に保つために質量が追加される可能性があります。
このタイプの問題を解決するには、次の2つの解決策があります:
- 2つのパートのうち少なくとも1つを可変形パートに切り替えます。
- ギャップと剛性を増大させた局所接触を追加します。
MASS OR ENERGY ERROR DUE TO HIGH DISTORTION
*** NODES WITH HIGHEST VELOCITY
*** NODES WITH HIGHEST MASS CHANGE概要:
非常に大きな塑性変形が生じている場合は、シミュレーションが不安定になり、エネルギーエラーまたは質量エラーが原因でシミュレーションが失敗し、ERROR終了する可能性があります。
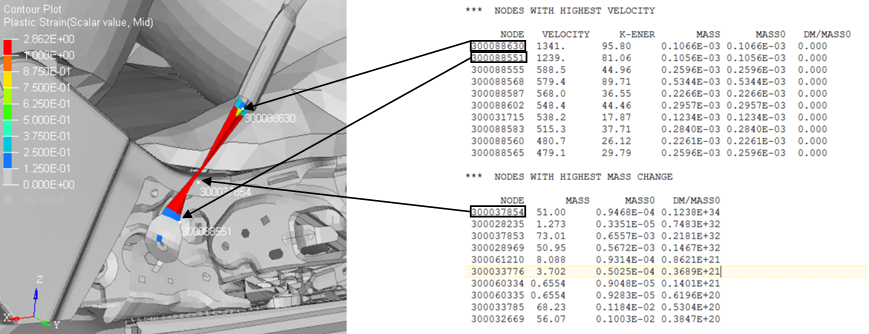
図 5.
図 5.
推奨される解決策:
結果に基づいて、この問題を解決する方法がいくつか存在します:
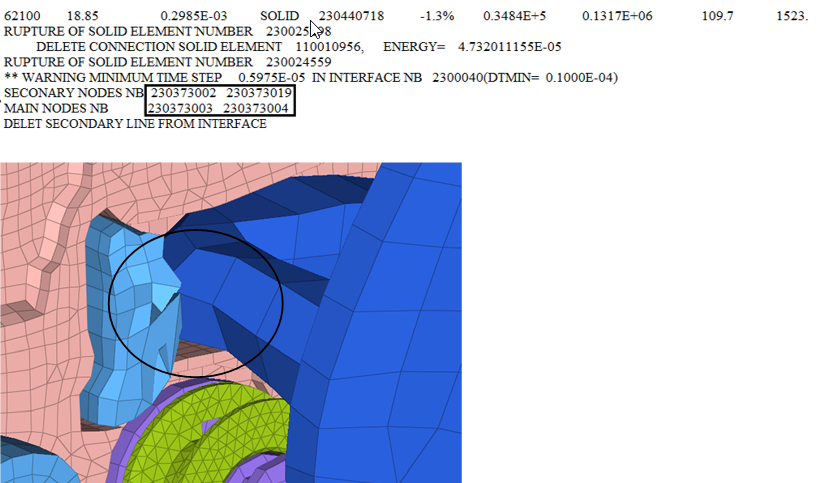
図 6.
- 適切なひずみ破壊を定義します。
- 材料が正しくないか(単位系)、不適切なタイプ(鋼鉄の代わりにプラスチックが使用されている、降伏点が低すぎるなど)の可能性があります。
図 6.
初期状態で、局所歪みを引き起こす交差が生じています。この問題を解決するには、この交差を修正して、適切なひずみ破壊を材料内で定義してください。
RIGID BODY BECOMES UNSTABLE
WARNING ID : 542
** WARNING RIGID BODY INERTIA
DESCRIPTION :
-- RIGID BODY ID : 713264
-- RIGID BODY TITLE : NULL
UNPHYSICAL INERTIA :
PRINCIPAL INERTIA 150.0050404753 IS CREATER THAN THE SUM
OF THE 2 OTHER ONES 0.60340391378794E-02 + 0.3645995262784E-02概要:
剛体の慣性が物理的でない場合、剛体は不安定になる可能性があります。剛体の慣性が物理的でない場合、RadiossはStarter内で警告を表示します。
それらの警告を修正しないと、以下の問題が発生する可能性があります:
- 剛体が不安定になり、その状態が車両内で非常に高速に進展します。
- 剛性セカンダリ節点は全体接触内に引き続き存在し、非現実的な変形を引き起こします。
- 衝突速度が非常に速いため(1500m/s超)数値上の問題が発生します。
推奨される解決策:
物理的でない剛体の慣性を修正します。
NEGATIVE INERTIA OR STIFFNESS
NEGATIBE INERTIA ON NODE ID=823767293概要:
一般にこの問題は、最近のバージョン(2017.x)よりもRadioss v12.xで多く発生します。この問題が発生するのは、インターフェースTYPE2の節点が最も近いメインセグメントの外に投影される場合です。このエラーは、メインセグメントに対するセカンダリ節点の高さとは関係なく、その投影がメインセグメントの外側になることに関連します。
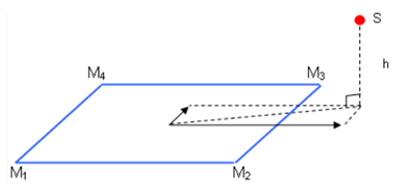
図 7.
図 7.
メインセグメントの外に投影される節点について、Starter内で警告が表示されます。
WARNING ID: 345
** WARNING : CHECK TIED INTERFACE
DESCRIPTION :
-- INTERFACE ID : 557392358
-- INTERFACE TITLE : CONNECTION.37
8238684 2 823767497 823767293 823767296 823767504 -1.279664112565 -0.9934883789504 0.7066172931858HyperCrashのモデルチェッカーを使用して、“Secondary nodes no proj.”を確認してください。これにより、最も近いメインセグメントの外に投影される節点を特定できます。
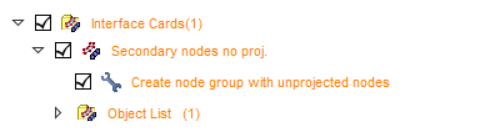
図 8.
図 8.
推奨される解決策:
この問題を解決するには、以下のようないくつかの方法があります:
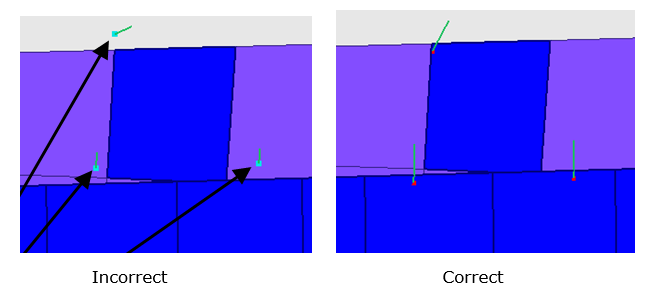
図 9.
- インターフェースTYPE2から最も近いメインセグメントの外に投影される節点を削除します。
- それらの節点を平行移動して、このセグメントの外に投影されないようにします。
図 9.