In the Kosloff-Frasier formulation seen in Kosloff and Frasier Formulation, the hourglass base vector is not perfectly orthogonal to the rigid body and deformation
modes that are taken into account by the one point integration scheme. The mean
stress/strain formulation of a one point integration scheme only considers a fully linear
velocity field, so that the physical element modes generally contribute to the hourglass
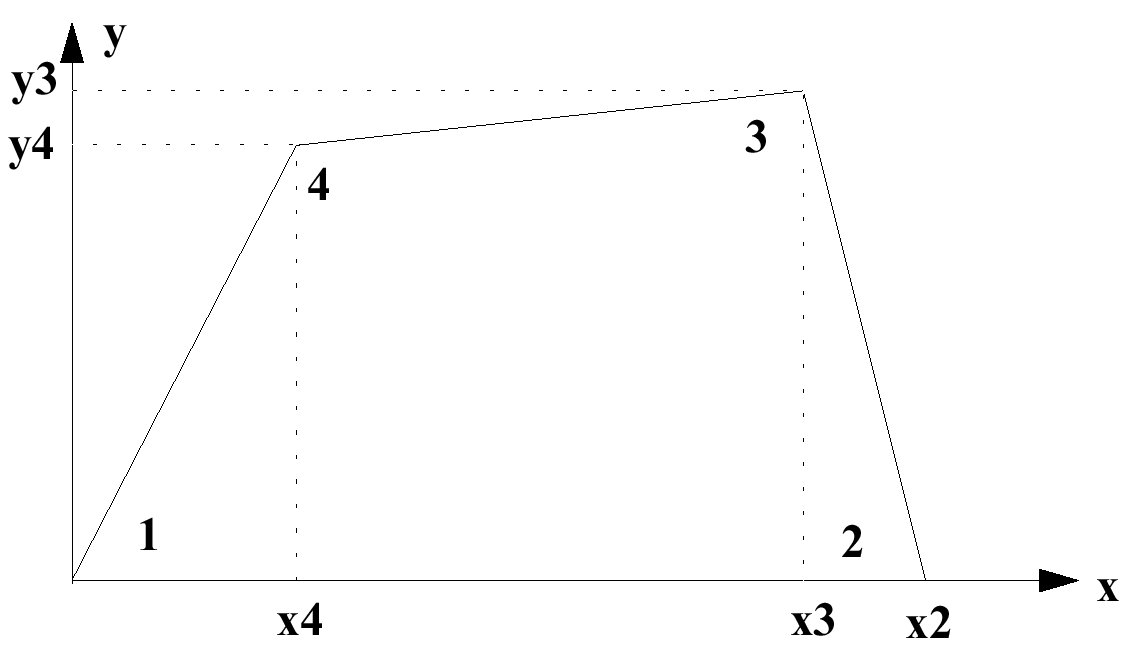
energy. To avoid this, the idea in the Flanagan-Belytschko formulation is to build an
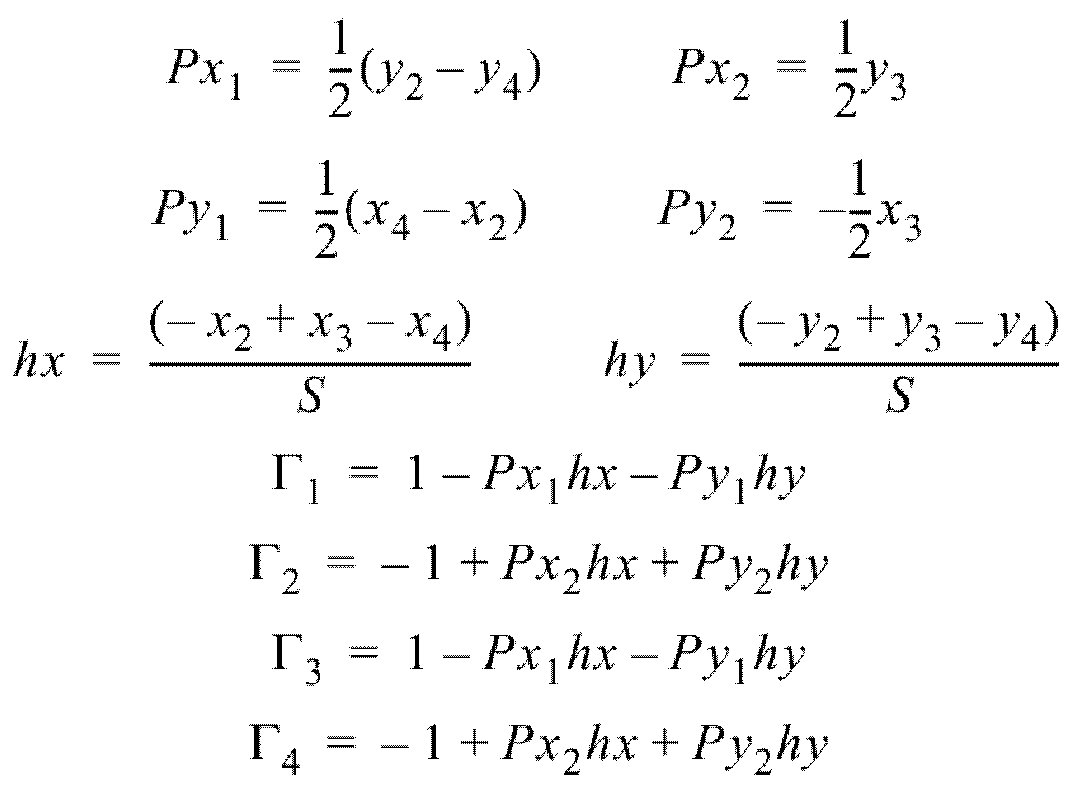
hourglass velocity field which always remains orthogonal to the physical element modes. This
can be written as:(1)
The linear portion of the velocity field can be expanded to give:(2)
Decomposition on the hourglass base vectors gives 1:(3)
is the hourglass shape vector used in place of in Hourglass Modes, 式 2. 図 1. Flanagan Belytschko Hourglass Formulation
Elastoplastic Hourglass
Forces
Ishell=3
The same formulation as elastic hourglass forces is used (Hourglass Elastic Stiffness Forces and Flanagan et al. 1) but the forces are bounded with a maximum force depending
on the current element mean yield stress. The hourglass forces are defined
as:(6)
It is shown in 2 that the non-constant part of the membrane strain rate does
not vanish when a warped element undergoes a rigid body rotation. Thus, a modified matrix [] is chosen using as a measure of the warping:(14)
This matrix is different from the Belytschko-Leviathan 3 correction term added at rotational positions,
which couples translations to curvatures as:(15)
This will lead to membrane locking (the membrane strain will not vanish under
a constant bending loading). According to the general formulation, the coupling is presented
in terms of bending and not in terms of membrane, yet the normal translation components in () do not vanish for a warped element due to the tangent vectors which differ from .
Fully Integrated
Formulation
Ishell=12
The element is based on the Q4
24
shell element developed in 4 by Batoz and Dhatt. The element has 4 nodes with 5 local
degrees-of-freedom per node. Its formulation is based on the Cartesian shell approach where
the middle surface is curved. The shell surface is fully integrated with four Gauss points.
Due to an in-plane reduced integration for shear, the element shear locking problems are
avoided. The element without hourglass deformations is based on Mindlin-Reissner plate
theory where the transversal shear deformation is taken into account in the expression of
the internal energy. Consult the reference for more details.
Shell Membrane
Damping
The shell membrane damping, dm, is only used for LAWS
25, 27, 19, 32 and 36. The Shell membrane damping factor is a factor on the numerical
VISCOSITY and not a physical viscosity. Its effect is shown in the formula of the
calculation of forces in a shell element:
read in D00 input (Shell membrane damping
factor parameter) then:(16)
Effect in the force vector () calculation:(17)
(18)
(19)
Where,
Density
Area of the shell element surface
dt
Time step
Sound speed
In order to calibrate the dm value so that it
represents the physical viscosity, one should obtain the same size for all shell elements
(Cf. factor), then scale the physical viscosity value to the
element size.
1Flanagan D. and Belytschko T., 「A Uniform Strain Hexahedron and Quadrilateral with Orthogonal Hourglass Control」, Int. Journal Num.Methods in Engineering, 17 679-706, 1981.
2Belytschko T., Lin J.L. and Tsay C.S., 「Explicit algorithms for the nonlinear dynamics of shells」, Computer Methods in Applied Mechanics and Engineering, 42:225-251, 1984.
3Belytschko T. and Leviathan I., 「Physical stabilization of the 4-node shell element with one-point quadrature」, Computer Methods in Applied Mechanics and Engineering, 113:321-350, 1992.
4Batoz J.L. and Dhatt G., 「Modeling of Structures by finite element」, volume 3, Hermes, 1992.