Predefined Paths
[FEEDFORWARD_STEERING]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'PREDEFINED'
BLOCK = ‘PATH'
INTEGRATION_STEP_SIZE = 0.01
[PATH]
TYPE = 'CONSTANT_RADIUS'
RADIUS = 40
INITIAL_STRAIGHT = 10
ENTRY_ANGLE = 0.39The vehicle follows the path as shown in the figure below:
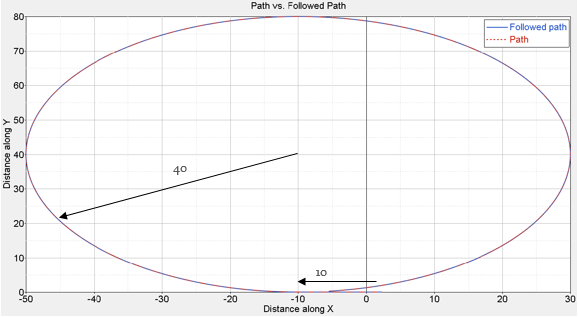
Figure 1.
Figure 1.
| [CONSTANT RADIUS] | ||
|---|---|---|
| TYPE | Attr - string | REQUIRED <CONSTANT_RADIUS> |
| RADIUS | Attr - real | REQUIRED Radius of the circle. |
| INITIAL_STRAIGHT | Attr - real | REQUIRED Length of the initial straight before entering the turn. |
| TURN | Attr - string | OPTIONAL
|
Similarly,
[PATH]
TYPE = 'SLALOM'
NUMBER_OF_CONES = 3
DESIRED_CG_LATERAL_DISP = 3
CONE_SPACING = 50
RECOVERY_LENGTH = 20
INITIAL_STRAIGHT = 20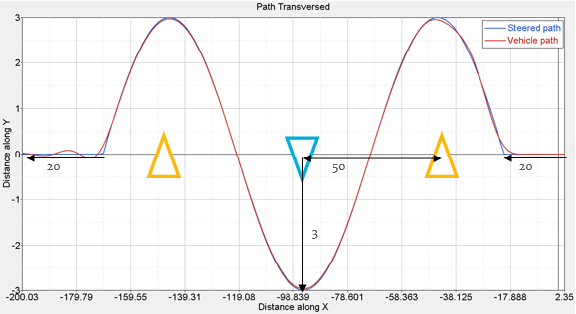
Figure 2.
| [SLALOM] | ||
|---|---|---|
| TYPE | Attr - String | REQUIRED <SLALOM> |
| NUMBER_OF_CONES | Attr - int | REQUIRED Number of cones. |
| DESIRED_CG_LATERAL_DISP | Attr - real | REQUIRED Desired CG lateral displacement. |
| CONE_SPACING | Attr - real | REQUIRED Distance between adjacent cones. |
| INITIAL_STRAIGHT | Attr - real | REQUIRED Straight section before entering slalom. |
| RECOVERY_LENGTH | Attr - real | REQUIRED Straight section after completing slalom. |
| ATTACK_DIRECTION | Attr - String | OPTIONAL
|
Path as sequence of straights and arcs:
[FF_STEER_CONTROLLER]
TAG = 'FEEDFORWARD'
LOOK_AHEAD_TIME = 0.5
PATH = 'SEQUENCE_OF_ST_CRV'
BLOCK = 'PATH'
INTEGRATION_STEP_SIZE = 0.010000
AGGRESSIVE = 'TRUE'
[PATH]
{KEY PAR0 PAR1}
'ST' 20.000000 0.000000
'ARC' 40.000000 -6.283184This creates a path that is sequence of a straight (20 m) and arc (Radius 40 m, Angle
6.283184 rad. clockwise).
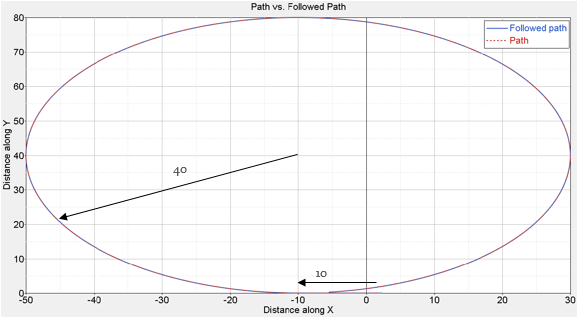
Figure 3.
Figure 3.
[PATH]
{KEY PAR0 PAR1}
'ST' 17.033191 0.000000
'ARC' 20.000000 -0.148890
'ST' 17.240436 0.000000
'ARC' 20.000000 0.148890
'ST' 17.033191 0.000000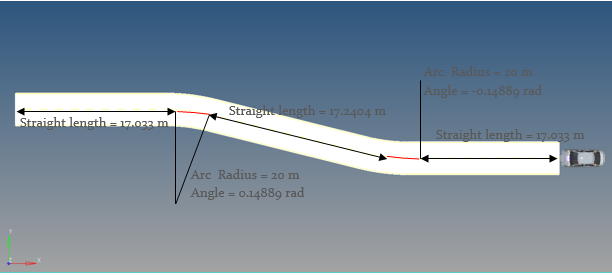
Figure 4.