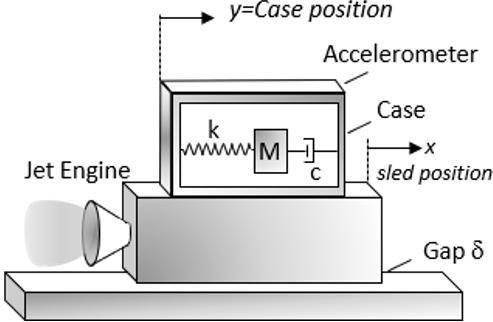
A mechanical accelerometer is used to measure the acceleration of a rocket test sled.
It contains a linear spring-damper system. See the image below. By tuning the
stiffness and damping, the accelerometer can be designed to estimate the
acceleration it feels within an acceptable time.
Figure 1.
Objective
We can compute the deviation of any system response
x
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=Hhaaaa@331E@
from its target value
x
*
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=HhapaWaaW
baaSqabeaapeGaa8Nkaaaaaaa@3415@
(1)
S
T
E
P
(
t
t
a
r
g
e
t
)
=
{
0
i
f
t
≤
t
t
a
r
g
e
t
1
i
f
t
>
t
t
a
r
g
e
t
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=nfacaWFub
Gaa8xraiaa=bfadaqadaWdaeaapeGaa8hDa8aadaWgaaWcbaWdbiaa
=rhacaWFHbGaa8NCaiaa=DgacaWFLbGaa8hDaaWdaeqaaaGcpeGaay
jkaiaawMcaaiabg2da9iaa=bkadaGabaWdaeaafaqabeGabaaabaWd
biaaicdacaWFGcGaa8xAaiaa=zgacaWFGcGaa8hDaiaa=bkacqGHKj
YOcaWFGcGaa8hDa8aadaWgaaWcbaWdbiaa=rhacaWFHbGaa8NCaiaa
=DgacaWFLbGaa8hDaaWdaeqaaaGcbaWdbiaaigdacaWFGcGaa8xAai
aa=zgacaWFGcGaa8hDaiabg6da+iaa=bkacaWF0bWdamaaBaaaleaa
peGaa8hDaiaa=fgacaWFYbGaa83zaiaa=vgacaWF0baapaqabaaaaa
GcpeGaay5Eaaaaaa@6101@
(2)
f
(
x
)
=
∫
t
s
t
a
r
t
t
e
n
d
S
T
E
P
(
t
t
a
r
g
e
t
)
*
|
x
−
x
*
|
d
t
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=zgadaqada
WdaeaapeGaa8hEaaGaayjkaiaawMcaaiabg2da9maawahabeWcpaqa
aaqaaaqdbaWdbiabgUIiYpaaDaaaoeaacaWF0bWdamaaBaaabaWdbi
aa=nhacaWF0bGaa8xyaiaa=jhacaWF0baapaqabaaapeqaaiaa=rha
paWaaSbaaeaapeGaa8xzaiaa=5gacaWFKbaapaqabaaaaaaak8qaca
WFtbGaa8hvaiaa=veacaWFqbWaaeWaa8aabaWdbiaa=rhapaWaaSba
aSqaa8qacaWF0bGaa8xyaiaa=jhacaWFNbGaa8xzaiaa=rhaa8aabe
aaaOWdbiaawIcacaGLPaaacaWFQaGaa8hOamaaemaapaqaa8qacaWF
4bGaeyOeI0Iaa8hEa8aadaahaaWcbeqaa8qacaWFQaaaaaGccaGLhW
UaayjcSdGaa8hzaiaa=rhaaaa@5A37@
The problem is formulated as:
m i n (
x −
x
*
)
2
|
s t e a d y s t a t e
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaqaaaaaaaaaWdbiaah2gacaWHPbGaaC
OBaiaacckacaGGGcGaaiiOaiaacckacaGGOaWaaqGaa8aabaacbiWd
biaa=HhacqGHsislcaWF4bWdamaaCaaaleqabaacbaWdbiaa+Pcaaa
GccaGGPaWdamaaCaaaleqabaWdbiaaikdaaaaakiaawIa7a8aadaWg
aaWcbaWdbiaa=nhacaWF0bGaa8xzaiaa=fgacaWFKbGaa8xEaiaa+b
kacaWFZbGaa8hDaiaa=fgacaWF0bGaa8xzaaWdaeqaaaaa@4D4C@
s u c h t h a t f (
x
) < 1 e − 3
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaqaaaaaaaaaWdbiaadohacaWG1bGaam
4yaiaadIgacaGGGcGaamiDaiaadIgacaWGHbGaamiDaGqaaiaa=bka
caWFGcGaa8hOaiaa=bkaieGacaGFMbWaaeWaa8aabaWdbiaa+Hhaai
aawIcacaGLPaaacqGH8aapcaaIXaGaa4xzaiabgkHiTiaaiodaaaa@4736@
Design Variables
The stiffness of the spring,
k
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=Tgaaaa@3311@
, and its damping,
c
MathType@MTEF@5@5@+=
feaagKart1ev2aqatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn
hiov2DGi1BTfMBaeXatLxBI9gBaebbnrfifHhDYfgasaacH8srps0l
bbf9q8WrFfeuY=Hhbbf9v8qiqrFr0xc9pk0xbba9q8WqFfea0=yr0R
Yxir=Jbba9q8aq0=yq=He9q8qqQ8frFve9Fve9Ff0dmeGabeqadiWa
ceGabeqabeqadeqadmaakeaaieGaqaaaaaaaaaWdbiaa=ngaaaa@3309@
, are the design variables.
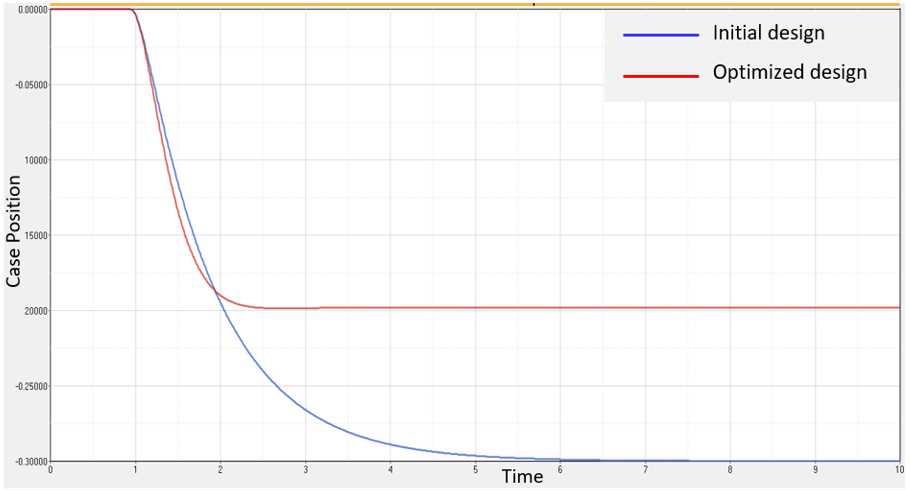
Results
By properly selecting the spring stiffness and damping, the
accelerometer can be designed to respond in the desired time frame.
Figure 2.