RD-E: 4500 Multi-Domain
Separate the whole model into main domain and sub-domain and solve each one with its own timestep. The new Multi-Domain Single Input Format makes the sub-domain part definition with the /SUBDOMAIN keyword.
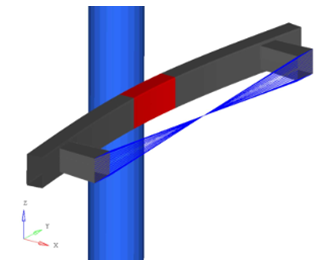
Figure 1.
Options and Keywords Used
- Multidomain Decomposition (/SUBDOMAIN)
- Multidomain Coupling (/RAD2RAD/ON)
- /INTER/TYPE2
- /SUBDOMAIN in bumper_LL4_0000.rad
(Starter).
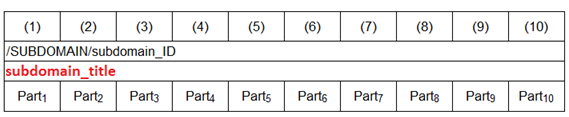
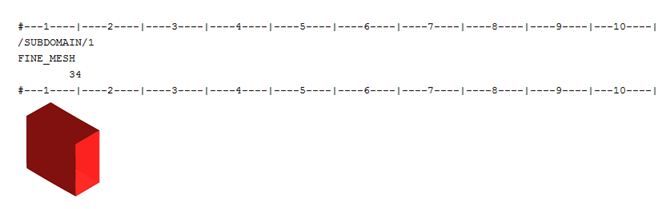
Note: Keep the "
subdomain_title" in /SUBDOMAIN the same as the sub-domain Engine file root_name.In this example, the "
subdomain_title" in /SUBDOMAIN is "FINE_MESH". Therefore, the Engine sub-domain is FINE_MESH_0001.rad. - /RAD2RAD/ON must be present in both Engine files:
In order to use the Multi-Domain technique, /RAD2RAD/ON in both Engine files needs to be defined, so that the Multi-Domain coupling can be established.
Contact between Domains
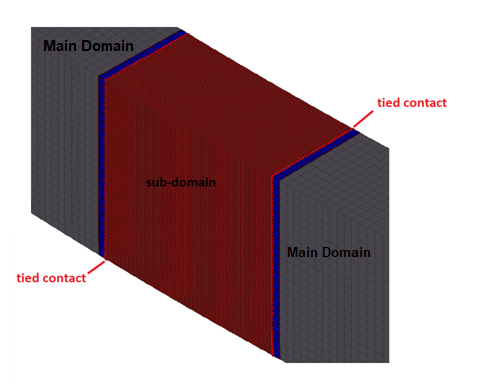
Figure 3.
- Two internal contact interfaces (/INTER/TYPE7) each one
treated in its own domain:
- Contact interface 1
- Self-contact interface for the main domain
- Contact interface 2
- Self-contact interface for the sub-domain
- Two contact interfaces (/INTER/TYPE7) for the interaction
between domains treated in the sub-domain:
- Contact interface 3
- Contact subframe/car - subframe on the secondary side
- Contact interface 4
- Contact car/subframe - subframe on the main side
In this case, if all contacts are treated in one single contact (/INTER/TYPE7), every element of the model would impact the sub-domain and all the elements of the model would be duplicated in the sub-domain. If the model is large, the Multi-Domain interface would be huge, the CPU cost of RAD2RAD would be very high; therefore, the performance of the computation is very poor. The warning message "Multi-Domains interface is too big" will be printed by Starter, in this instance.
Input Files
Refer to Access the Model Files to download the required model file(s).
Model Description
The bumper beam impacts the rigid cylinder (254 mm diameter) with an initial velocity of 5m/s. The crash box behind the bumper is fixed in all directions, except translation in x direction - the pillar is fixed in all directions.
Units: mm, ms, kg, N, GPa
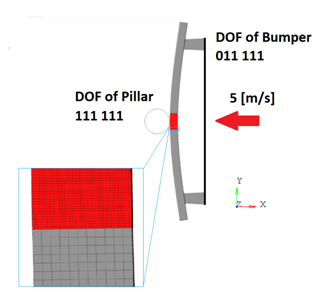
Figure 4. Problem Description
Model Method
In order to get more accurate results, use a fine mesh in the area of interest (high deformation location). In this example, the part near the impact area (highlighted in red) where the bumper highly deforms was chosen. The fine mesh size is about 2 mm, whereas the mesh size of the remaining part is about 7 mm. The finely meshed part has 18370 shell elements that represent nearly 50% of the whole model. In explicit analysis, the timestep will be controlled by this fine mesh. In order to improve performances, this computation is usually treated with classical mass scaling (/DT/NODA/CST). It is possible to use a small timestep for the fine meshed part and a large timestep for the coarse meshed part using the Multi-Domain technique.
There are two different methods to use the Multi-Domain technique. The first (old) method requests users to build separate Starter and Engine files for each domain and to define a /LINK keyword for the connections between domains.
A new feature was introduced in Radioss v11.0.220 called Multi-Domain Single Input Format. Using the keyword /SUBDOMAIN, you can insert the parts, which use a different timestep into the new sub-domain and create an Engine file with its specific timestep. Radioss will automatically create the Starter information for the sub-domain and its link for connection between the two domains.
Results
- Test 1: Mono-Domain - free DT control
- Test 2: Multi-Domain - free DT control
| Test | Mono-Domain (1) Free DT Control | Multi-Domain (2) | |
|---|---|---|---|
| Main Domain Free DT Control | Sub-domain Free DT Control | ||
| CPU | 1 | 1 | 1 |
| Timestep [ms] | 2E-04 | 8E-04 | 2E-04 |
| CPU time [s] | 5.93E+03 | 0.67E+03 | 2.64E+03 |
| Elapsed time [s] | 5.9E+03 | 3.3E+03 | |
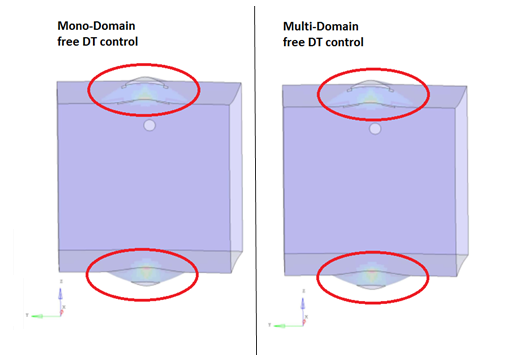
Figure 5. Failure of Crash Box in the Two Tests
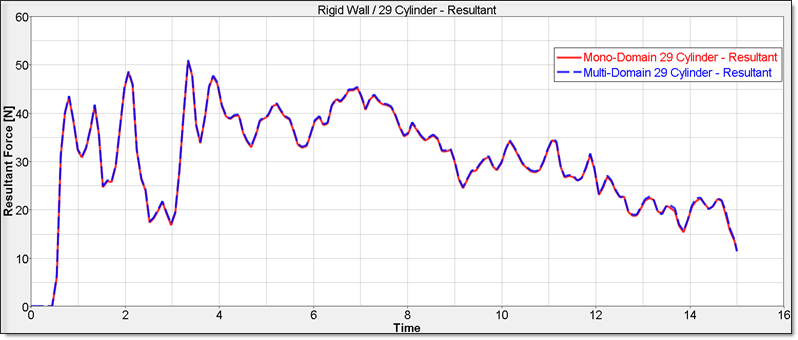
Figure 6. Impactor Force of the Two Tests
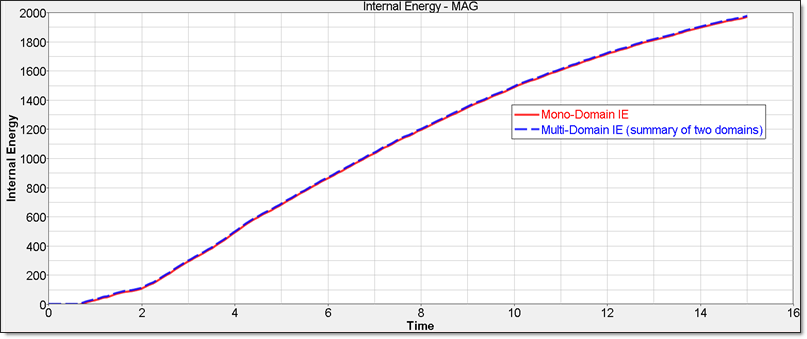
Figure 7. Internal Energy of the Two Tests
When using Multi-Domain, the performance will be more significant for large models or for cases where the fine mesh part represents less than 30% of the whole model (50% here is a lot).
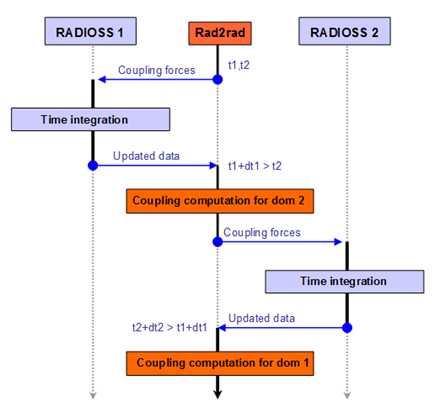
Figure 8. RAD2RAD Multi-Timestep Method
Conclusion
By using the Multi-Domain approach, the computation time can be reduced significantly, with preserving high quality results.
The new single input file format makes the Multi-Domain more user friendly, compared to the set-up process in earlier versions.