SimSolidでは、ボルトに働く力をボルトとナットのジオメトリに適用できます。
ボルトとナット
SimSolidでは、ボルトがそのジオメトリ属性によって自動的にボルトとして識別されます。ボルトには、円筒形状のボディと六角形を基本とする形状の頭部が必要です。ボルト頭部の外径と内径に六角形状を配置できます。ナットは、この六角形に基づく特徴的な形状を使用してボルトと同様に識別されます。
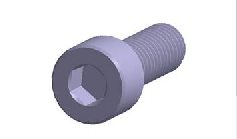
図 1.
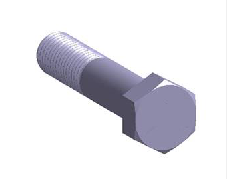
図 2.
SimSolidでは、以下のようなさまざまなジオメトリに締め付け荷重を適用できます:
- ブラインドボルト
- ナットをねじ込んだボルト
- ねじ棒にねじ込んだナット
- 一般的な支柱またはハンドルにねじ込んだナット
トルクMと軸力Fとの関係
Mは締め付けの最後で得られる最大モーメントであり、ナットと構造との接触面の摩擦力によるモーメントと釣り合っています。
わかりやすくするために、接触面に対する法線力が均一に分布していると仮定すると、接触圧力は以下のようになります。
(1)
(2)
R0とR1はそれぞれ接触スポットの内側と外側の曲率です。分散した摩擦力は
となります。fは摩擦係数です。
極座標系で見ると、ボルトの軸を中心とした摩擦力の微小モーメントは以下のようになります。
rは軸までの距離、dRは半径方向の変分、dTetは角度方向の変分です。
この基本モーメントを接触面積にわたって積分すると、
となります。この方程式は、適用したトルクMと軸力の関係式です。
軸力
軸力は、次のように構造とボルトの剛性およびボルトに対するナットの配置に依存します。
(3)
Kは構造の剛性係数、Dはナットの相対的な変位です。
相対的な変位は
で記述できます。Nはナットの回転数、Hはねじのピッチです。したがって、
となります(式A)。
最初の解析パスでナットの1回転(N(1)=1)を記述すると仮定して、この解析から対応する軸力F(1)が求められます。この場合の構造の剛性係数は次のように定義できます。
(4)
これにより、以下が成り立ちます。
.
これで、トルクをナットの回転数に関連付けることができます。
(5)
したがって、規定のトルクMを実現するには、N=1として最初の解析を終了した後、次の方程式を使用して2回目の解析パス(2回目の収束パス)を実行する必要があります。
(6)
一般的に、解析パス(i+1)で適用する回転数は次のようになります。
(7)
N(i)は、前回の解析パスで適用した回転数、F(i)は、前回の解析パスでの評価で得られた軸力です。適用する回転数に対するこのような補正は重要です。解析パスの進行と共に解の精度が高くなり、上記の方程式Aによって構造の剛性係数Kが変化するからです。したがって、Kは定数ではなく、解析パスのK(i)に依存します。