Wheel Posts
Attention: It is necessary for the
vehicle model to contain AutoTires to attach with wheel posts. If the vehicle has legacy
tire models which use MotionView Forces/Moment entities to model
the tires, you will need to replace these with AutoTires before adding the n-Post
event.
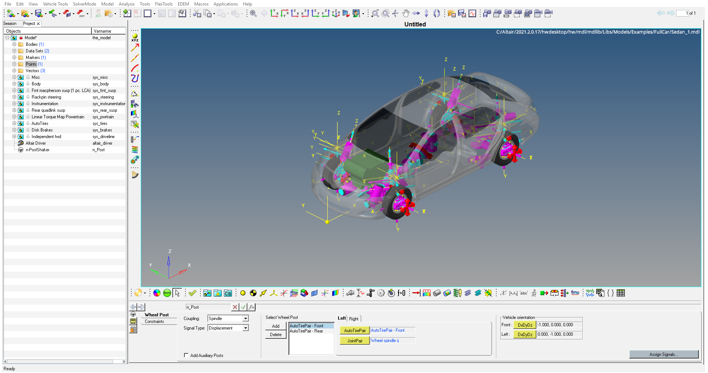
Figure 1. A Post is added for each AutoTire
Coupling
You can couple the wheel body of the AutoTire to the wheel post by using two methods:- Spindle Coupled
- The wheel body is constrained at the wheel center to the vertical motion of the wheel
post. The wheel body is free to move longitudinally, laterally and to rotate about any
direction relative to the wheel post.Note:
- The Wheel post connects to the ground by an orientation joint.
- The Wheel Body is connected to the Jack Body by an inplane joint.

Figure 2. Spindle Coupling - Tire Coupled
- The wheel body attaches to the post via a linear stiffness and damping representing
the tire. The force in the stiffness and damping acts between the wheel body and the
post in the global Z direction. You enter the Radius, Stiffness and Damping as shown in
the panel. These parameters are used in an IMPACT function with the exponent value set
to 1.0. The function takes the following form with parameters plugged in:
`IMPACT( DZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), VZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), {ds_actData.real_tireRadius.value}, {ds_actData.real_tireStiffness.value}, 1.0, {ds_actData.real_tireDamping.value}, 0.001)`Use the ‘Apply to all’ option to update the Radius, Stiffness and Damping values in all wheel posts.
Note:- The Wheel post is constrained to the ground by an orientation joint.
- AutoTire systems are deactivated before exporting the solver input file.

Figure 3. Tire Coupling
Signal Type
You can input Displacement, Force/Moment and Acceleration signals to wheel posts:- Displacement signals
- Force/MomentNote: If the ‘Add Wheel Reaction Forces’ option is checked, the reaction forces are calculated at the wheels, after the static simulation and added to the Z-direction force signal provided by the user. The force signal is applied to the Wheel Post and can be seen in the n-Post Signal Manager.
- Acceleration: Acceleration is first converted to displacement, following which the displacement is applied.
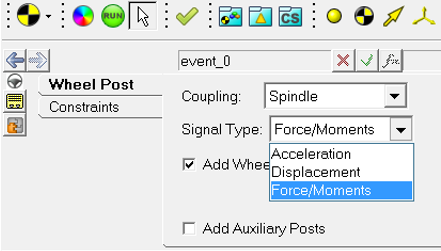
Figure 4. Signal Types