The ID of the contact force modeling element
(Force_Contact in the XML) for which the results are
desired.
I_GRA_ID
[integer]
The ID of the I body's graphic representation. If the body is flexible, this
attribute is ignored, and any integer value can be provided.
J_GRA_ID
[integer]
The ID of the J body's graphic representation. If the body is flexible, this
attribute is ignored, and any integer value can be provided.
TYPE
[string]
The type of contact result that is requested. Choose from:
Type
Description
"PD"
Penetration depth (scalar).
"PD_VEL"
Penetration rate, in other words, the first time derivative of
the penetration depth (scalar).
"SLIP_VEL"
Slip velocity (scalar).
"POS"
Position of the point of contact (vector).
"VEL"
Velocity of the point of contact (vector).
"NORMAL_FORCE"
Normal contact force (vector).
"TANGENTIAL_FORCE"
Tangential contact force (vector).
"TOTAL_FORCE"
Total contact force (vector).
"HAS_TRIA_ID"
A flag for determining whether the geometry in contact is
tessellated (scalar).
"TRIA_ID_I"
The ID of the triangle(s) or element(s) that is/are in contact
on the I body (scalar or list, based on the number of
triangles/elements in contact).
This type only makes sense if HAS_TRIA_ID is
true.
"TRIA_ID_J"
The ID of the triangle(s) or element(s) that is/are in contact
on the J body (scalar or list, based on the number of
triangles/elements in contact).
"INTERSECTION_ID"
An ID that is common between all the contact points that belong
to the same contact patch. This is useful for determining the
number of contact patches at the current time in the simulation.
See Comment 2 for a definition of contact
patch.
All the above quantities are represented in model units, wherever
applicable.
RM
[integer]
The ID of a reference marker that allows you to request contact states with
respect to a frame of reference of your choice. This frame of reference is
only applicable to the following types:
type = "POS"
type = "VEL"
type = "NORMAL_FORCE"
type = "TANGENTIAL_FORCE"
type = "TOTAL_FORCE"
INDEX
[integer]
There may be several locations where contact occurs between the I and J body
at a particular time in the simulation. The INDEX input
tells MotionSolve which contact the states are
being requested for. The INDEX is a 1-based index and can
have a maximum value of what is returned by the utility function
GET_NCONTACTS. Thus,
1 <=
INDEX <=
GET_NCONTACTS().
Output
RESULT
[double]
A scalar, vector, or a list of the values returned by
GET_CONTACT_POST.
NRESULTS
[integer]
The size of RESULT. This is not required while using the
Python utility function.
ERRFLG
[logical]
A value that is true if an error occurs during the call to
GET_CONTACT_POST.
Comments
The GET_CONTACT_POST utility function is
applicable to both mesh based and semi-analytical (for example, sphere-mesh) based
contact modeling. However, this utility function is not supported for legacy models
that make use of the old (OPCODE) collision engine.
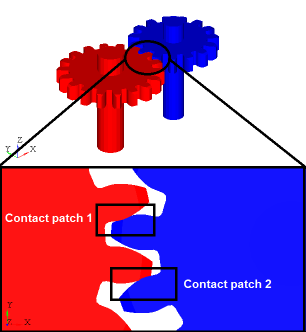
A contact patch is defined as a collection of points of
contact between body I and J. If these points of contacts are not connected with one
another, then these are termed as separate contact patches.
Figure 1
shows two spur gears in contact with each other; two separate contact patches
are illustrated.
Figure 1. Illustration of Contact Patches
You may use the type = "INTERSECTION_ID" to keep track of
different contact patches at the given time in the simulation.
Note: The intersection ID may change across time steps.