You can activate Mount Limits to simulate material contact between the bodies that
the bushing connects. This contact limits the bushing deflection. When the deflection is
sufficient in a given direction to close the gap distance, the mount limit forces or torques
become active. The forces and torque are computed using an impact function. An exponent
greater than one (1) provides increasing stiffness with penetration. The damping force is
smoothed with a cubic step function over the penetration distance.
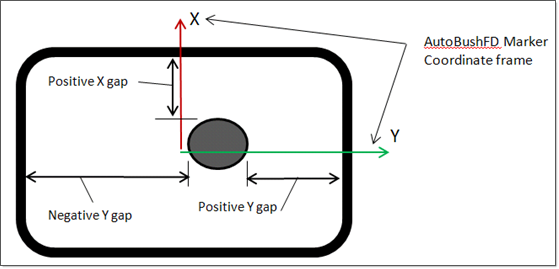
The figure below illustrates the concept of positive and
negative gap for mount limits in a bushing: Figure 1.
Click Activate to enable the options.
For Gap, enter a positive real value giving the bushing
deflection where the bodies contact. The limit force or torque is zero until the
bushing deflection closes the corresponding gap. The dimension is length.
For Stiffness, enter a positive real value giving the
limit stiffness for the given direction.
Note: Translation dimensions are force and length-1. Rotational
dimensions are force, length, and angle-1.
In the Exponent field, enter a positive real value
giving the power penetration is raised to. An exponent greater than one (1.0)
gives increasing stiffness with penetration.
For Damping, enter a positive, real value for the
damping coefficient.
Note: Translation dimensions are force, time, and length-1.
Rotational dimensions are force, length, time, and
angle-1.
For Penetration, enter a positive, real value giving the
penetration at which the damping is fully effective. Damping forces and torques
are smoothed by cubic step function over the penetration to prevent
discontinuity of the damping force or torque. The dimension is length.