/GJOINT
ブロックフォーマットのキーワード 複雑な(ギアタイプ)ジョイントを定義します。このキーワードはSPMDでの計算には利用できません。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /GJOINT/type/joint_ID/unit_ID | |||||||||
| joint_title | |||||||||
| node_ID0 | FscaleV | Mass | Inertia | node_ID1 | node_ID2 | node_ID3 | |||
| Mass1 | Inertia1 | r1x | r1y | r1z | |||||
| Mass2 | Inertia2 | r2x | r2y | r2z | |||||
| Mass3 | Inertia3 | r3x | r3y | r3z | |||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| type | 入力タイプ (使用可能なキーワードについては、下の表をご参照ください) |
|
| joint_ID | ギアタイプのジョイントの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| joint_title | ギアタイプのジョイントのタイトル (文字、最大100文字) |
|
| node_ID0 | 1次節点の識別子(位置節点) (整数) |
|
| FscaleV | 速度のスケールファクター デフォルト = 1.0(実数) |
|
| Mass | 1次節点の付加質量 デフォルト = 0.0(実数) |
|
| Inertia | 1次節点の追加慣性 デフォルト = 0.0(実数) |
|
| node_ID1 | 節点識別子N1 (整数) |
|
| node_ID2 | 節点識別子N2 (整数) |
|
| node_ID3 | 節点識別子N3 - ディファレンシャルギアジョイントの場合にのみ必要です。 (整数) |
|
| Mass1 | node_ID1の付加質量 デフォルト = 0.0(実数) |
|
| Inertia1 | node_ID1の付加慣性 デフォルト = 0.0(実数) |
] |
| r1x | 局所軸Xの成分 デフォルト = 1.0(実数) |
|
| r1y | 局所軸Yの成分 デフォルト = 0.0(実数) |
|
| r1z | 局所軸Zの成分 デフォルト = 0.0(実数) |
|
| Mass2 | node_ID2の付加質量 デフォルト = 0.0(実数) |
|
| Inertia | node_ID2の付加慣性 デフォルト = 0.0(実数) |
] |
| r2x | 局所軸Xの成分 デフォルト = 1.0(実数) |
|
| r2y | 局所軸Yの成分 デフォルト = 0.0(実数) |
|
| r2z | 局所軸Zの成分 デフォルト = 0.0(実数) |
|
| Mass3 | node_ID3の付加質量 デフォルト = 0.0(実数) |
|
| Inertia3 | node_ID3の付加慣性 デフォルト = 0.0(実数) |
] |
| r3x | 局所軸Xの成分 デフォルト = 1.0(実数) |
|
| r3y | 局所軸Yの成分 デフォルト = 0.0(実数) |
|
| r3z | 局所軸Zの成分 デフォルト = 0.0(実数) |
複雑なジョイントタイプ
- タイプ
- 内容
- GEAR
- ∞回転ギア
- DIFF
- ∞ディファレンシャルギア
- RACK
- ∞ラックアンドピニオン
コメント
- 複雑な(ギアタイプ)ジョイントは、Lagrange乗数法によって処理される運動学的拘束条件ファミリーに属します。ジョイントの位置は、2つまたは3つの2次節点と結合する中心node_ID0によって定義されます。質量および慣性をすべての節点に追加する必要があります。1次節点は、ジョイントの質量の中心に配置することが推奨されます。運動学的拘束条件によって、2次節点の速度間の関係が設定されます。
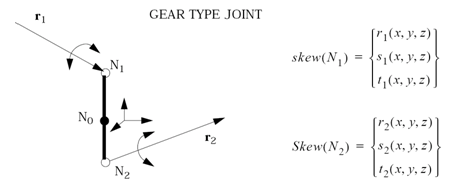
図 1. - ギアジョイント節点の並進速度は、剛性リンクの関係による制約を受けます。回転自由度については、node_ID1およびnode_ID2の局所座標で測定された速度間にスケールファクタが適用されます。対応する拘束方程式は:
(1) (2) (3) (4) (5) ここで、 と は、node_ID1およびnode_ID2の剛体回転速度に対する相対回転速度です。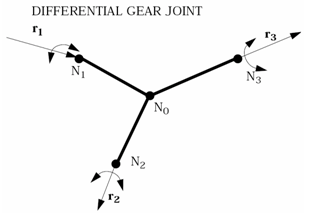
図 2. - ディファレンシャルギアジョイントの回転速度は、下記の関係による制約を受けます:
(6) (7) (8) 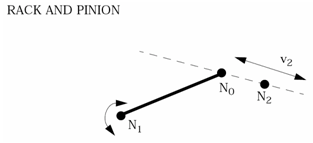
図 3. - ラックアンドピニオンのジョイントは、node_ID1の回転速度をnode_ID2の並進速度へ変換することを可能にします。これらの速度の拘束方程式は:
(9) (10) (11) - 節点識別子node_ID3は、ディファレンシャルギアジョイントの場合にのみ必要です。
- 下記に適用する場合、このオプションは使用できません:
- 質量が0の節点
- 慣性が0の節点(ラックタイプGJOINTのnode_ID2の場合を除く)。