/INTER/LAGDT/TYPE7
ブロックフォーマットのキーワード 一定最小時間ステップを持つインターフェースTYPE7を記述します。インターフェースTYPE7と同じ挙動ですが、最小時間ステップ(/DT/INTER/CSTで定義)に達した場合は、Lagrange乗数定式化への切り替えが可能です。
内容
- Lagrange乗数定式化を伴うインターフェース TYPE7と同じ制限を持ちます。
- Lagrange乗数定式化への切り替え後は摩擦が機能しません。
- SPMDとの適合性はまだありません。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /INTER/LAGDT/TYPE7/inter_ID/unit_ID | |||||||||
| inter_title | |||||||||
| grnd_IDs | surf_IDm | Istf | Igap | Ibag | Idel | ||||
| Fscalegap | Gapmax | ||||||||
| Stmin | Stmax | ||||||||
| Stfac | Fric | Gapmin | Tstart | Tstop | |||||
| IBC | Inacti | VISs | VISF | Bumult | |||||
| Ifric | Ifiltr | Xfreq | Iform | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C4 | C5 | |||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| C6 | |||||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| inter_ID | インターフェースの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| inter_title | インターフェースのタイトル (文字、最大100文字) |
|
| grnd_IDs | セカンダリ節点グループ識別子 (整数) |
|
| surf_IDm | メインサーフェスの識別子 (整数) |
|
| Istf | 剛性定義フラグ 4
(整数) |
|
| Igap | ギャップ/要素オプションフラグ
(整数) |
|
| Ibag | 接触時のエアバッグベントホール閉鎖フラグ
(整数) |
|
| Idel | 節点およびセグメントの削除フラグ。 2
(整数) |
|
| Fscalegap | ギャップスケールファクター デフォルト = 1.0(実数) |
|
| Gapmax | 最大ギャップ
(実数) |
|
| Stmin | 最小剛性 (実数) |
|
| Stmax | 最大剛性 デフォルト = 1030(実数) |
|
| Stfac | インターフェース剛性、Istf = 1の場合。 デフォルト = 0(実数) |
|
| インターフェースの剛性スケールファクター、Istf = 0の場合。 デフォルト = 1.0(実数) |
||
| Fric | Coulomb摩擦。 (実数) |
|
| Gapmin | 衝撃アクティブ化の最小ギャップ (実数) |
|
| Tstart | 開始時間 (実数) |
|
| Tstop | 一時的な非アクティブ化の時間。 (実数) |
|
| IBC | 接触時の境界条件の非アクティブ化フラグ (ブーリアン) |
|
| Inacti | 初期貫通時の剛性の非アクティブ化フラグ 8
(整数) |
|
| VISs | インターフェース剛性の臨界減衰係数 デフォルトは0.05に設定されます(実数) |
|
| VISF | 接触面摩擦の臨界減衰係数 16 デフォルトは1.0に設定されます(実数) |
|
| Bumult | ソート係数。 11 12 デフォルトは0.20に設定されます(実数) |
|
| Ifric | 摩擦定式化フラグ。 15
(整数) |
|
| Ifiltr | 摩擦フィルタリングフラグ。 16
(整数) |
|
| Xfreq | フィルタリング係数。 0~1の値である必要があります。 (実数) |
|
| Iform | 摩擦ペナルティ定式化のタイプ。
(整数) |
|
| C1 | 摩擦則係数。 (実数) |
|
| C2 | 摩擦則係数。 (実数) |
|
| C3 | 摩擦則係数。 (実数) |
|
| C4 | 摩擦則係数。 (実数) |
|
| C5 | 摩擦則係数。 (実数) |
|
| C6 | 摩擦則係数。 (実数) |
境界条件の非アクティブ化フラグ:IBC
| (1)-1 | (1)-2 | (1)-3 | (1)-4 | (1)-5 | (1)-6 | (1)-7 | (1)-8 |
|---|---|---|---|---|---|---|---|
| IBCX | IBCY | IBCZ |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| IBCX | 衝撃時のX境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCY | 衝撃時のY境界条件の非アクティブ化フラグ
(ブーリアン) |
|
| IBCZ | 衝撃時のZ境界条件の非アクティブ化フラグ
(ブーリアン) |
コメント
- フラグIbagについては、モニター体積オプション(モニター体積(エアバッグ))をご参照ください。
- フラグ Idel = 1のCPUコストはIdel = 2よりも高くなります。
- Igap = 2の場合、可変ギャップは次のように計算されます:
(1) Igap ≠ 2の場合、行4で指定された値は無視されます。
- 接触剛性は以下のように計算されます:
- Istf = 0の場合の剛性
- Istf > 1の場合の剛性
(2) ここで、-
は右記の両方から次のように計算されます; メインセグメントの剛性
とセカンダリ節点の剛性
Istf = 2、
Istf = 3、
Istf = 4、
Istf = 5、
-
はメインセグメントの剛性で、次のように計算されます:
メインセグメントがシェル上に存在するか、シェルとソリッドによって共有されている場合(3) メインセグメントがソリッド上に存在する場合。(4) ここで、- セグメント面積
- ソリッドの体積
- 体積弾性率
- インターフェースTYPE7として考慮される相当節点剛性で、次のように計算されます:
- 節点がシェル要素に結合されている場合:
(5) - 節点がソリッド要素に結合されている場合:
(6)
- 節点がシェル要素に結合されている場合:
-
は右記の両方から次のように計算されます; メインセグメントの剛性
とセカンダリ節点の剛性
剛性係数の値に対する制限はありません(ただし、値が1.0より大きいと、初期時間ステップが短くなる場合があります)。
- Istf = 0の場合の剛性
- Istf < 1の場合、行5で指定された値は無視されます。
- Gapminのデフォルト値は、下記の最大値として計算されます:
(7) ここで、- メインシェル要素の平均板厚
- メインソリッド要素の平均辺長
- すべてのメインセグメント(シェルまたは3次元ソリッド)の中の最小辺長
- ギャップは衝撃のそれぞれに対して下記の式で計算されます:
(8) ここで、-
: メイン要素のギャップ:
(9) ここで、 : シェル要素に対するメイン要素の板厚
= 0(3次元ソリッド要素の場合)
-
: セカンダリ節点のギャップ:= 0(セカンダリ節点がどの要素にも結合されていないか、3次元ソリッド要素またはスプリング要素にのみ結合されている場合)
(10) ここで は、セカンダリ節点に結合されているシェル要素の最大板厚です。
(トラスおよびビーム要素の場合)。ここで、 は要素の断面とします。
セカンダリ節点が複数のシェルおよび/またはビームまたはトラスに結合されている場合は、計算された中で最も大きいセカンダリギャップが使用されます。
可変ギャップは常にGapmin以上です。
-
: メイン要素のギャップ:
- 境界条件の非アクティブ化は、セカンダリ節点グループ(grnd_IDs)に適用されます。
- 節点がスプリング要素に属している場合にInacti = 3であると、初期エネルギーが発生することがあります。
Inacti = 5は、エアバッグシミュレーション展開に推奨されています。
インターフェースに対する高周波数の影響を回避するためには、Inacti =5ではなく、Inacti = 6が推奨されます。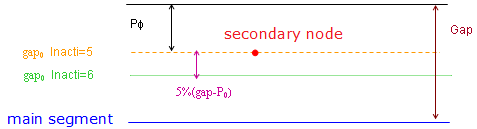
図 1. - ソートアルゴリズムを高速化するには、ソート係数Bumultを使用します。
- Bumultのデフォルト値は、150万個を超える節点を持つモデルでは0.30に、250万個を超える節点を持つモデルでは0.40に自動的に増やされます。
- 1つの節点が2つのサーフェスに同時に属することができます。
- 剛性係数の値に制限はありません(ただし、値が1.0より大きいと、最初の時間ステップが短くなる場合があります)。
- 摩擦定式化の場合
- 摩擦フラグIfric = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
ここで、 ( は、クーロン摩擦係数)
- フラグIfric > 0の場合、新しい摩擦モデルが導入されます。この場合、摩擦係数は次の関数によって設定されます:
ここで、
- メインセグメントの垂直抗力の圧力
- セカンダリ節点の接線速度
- 摩擦フラグIfric = 0(デフォルト)の場合は、従来の静的摩擦係数の定式化が使用されます:
- 現在は、係数C1~C6を使用して、新しい摩擦定式化の可変摩擦係数
を定義しています。以下の定式化を使用できます:
- Ifric = 1(汎用の粘性摩擦則):
(11) - Ifric = 2(Darmstad則):
(12) - Ifric = 3(Renard則):
(13) (14) (15) ここで、
- 第1臨界速度 = は0以外にする必要があります(C5 ≠ 0)。
- 第1臨界速度 は、第2臨界速度 より小さくする必要があります。
- 静止摩擦係数C1と動摩擦係数のC2は、最大摩擦係数C2より小さくする必要があります(C4 ≤ C1かつC4 ≤ C2)。
- Ifric = 1(汎用の粘性摩擦則):
- 摩擦フィルタリングIfiltr ≠ 0の場合は、接線力がフィルタを使用して以下のようにスムージングされます:
(16) ここで、α係数は、以下のように計算されます:- Ifiltr = 1 ➤ の場合、単純な数値フィルター
- Ifiltr = 2 ➤ の場合、標準の-3dBフィルター。ここで、 で、 はフィルタリング期間
- Ifiltr = 3 ➤ の場合、カット周波数Xfreqを使用する標準の-3dBフィルター
フィルタリング係数Xfreqは、0~1の値にする必要があります。
- 摩擦ペナルティ定式化Iform
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです:
(17) - このとき、粘着力は以下のように計算されます:
(18) - Iform = 2の粘性定式化の場合、摩擦力は次のとおりです:
(19) - このとき、粘着力は以下のように計算されます:
(20) ここで、 は、接触接線速度です。
- Iform = 1(デフォルト)の粘性定式化の場合、摩擦力は次のとおりです: