/SLIPRING/SPRING
ブロックフォーマットのキーワード /MAT/LAW114と/PROP/TYPE23を使用して定義されたシートベルト要素の1Dスリップリングを定義します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /SLIPRING/SPRING/slipring_ID/unit_ID | |||||||||
| slipring_title | |||||||||
| El_ID1 | El_ID2 | node_ID1 | node_ID2 | sens_ID | Fl_flag | A | Ed_factor | ||
| fct_ID1 | fct_ID2 | Fric_d | Xscale1 | Yscale2 | Xscale2 | ||||
| fct_ID3 | fct_ID4 | Fric_s | Xscale3 | Yscale4 | Xscale4 | ||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| slipring_ID | スリップリングの識別子。 (整数、最大10桁) |
|
| unit_ID | (オプション)単位の識別子。 (整数、最大10桁) |
|
| slipring_title | スリップリングのタイトル。 (文字、最大100文字) |
|
| El_ID1 | スリップリングの1つ目の要素のID。 (整数、最大10桁) |
|
| El_ID2 | スリップリングの2つ目の要素のID。 (整数、最大10桁) |
|
| node_ID1 | 固定節点のID。 (整数、最大10桁) |
|
| node_ID2 | スリップリングの方向を示す節点のID(オプション)。 (整数、最大10桁) |
|
| sens_ID | スリップリングをロックするために使用されるセンサーの識別子。
(整数) |
|
| Fl_flag | スライド方向を制御するフラグ
(整数) |
|
| A | クーロン摩擦スケールファクター。 (実数) |
|
| Ed_factor | クーロン摩擦の指数減衰係数。 (実数) |
|
| fct_ID1 | 動的クーロン摩擦係数を時間の関数として定義する関数の識別子。 (整数) |
|
| fct_ID2 | 動的クーロン摩擦係数を垂直抗力の関数として定義する関数の識別子。 (整数) |
|
| Fric_d | 動的クーロン摩擦係数。 fct_ID1 = 0の場合: 一定の値(デフォルト = 0)。 fct_ID1 > 0の場合: 関数fct_ID1の縦軸スケールファクター(デフォルト = 1)。 (実数) |
|
| Xscale1 | 関数fct_ID1の横軸スケールファクター。 デフォルト = 1(実数) |
|
| Yscale2 | 関数fct_ID2の縦軸スケールファクター。 デフォルト = 1(実数) |
|
| Xscale2 | 関数fct_ID2の横軸スケールファクター。 デフォルト = 1(実数) |
|
| fct_ID3 | 静的クーロン摩擦係数を時間の関数として定義する関数の識別子。 (整数) |
|
| fct_ID4 | 静的クーロン摩擦係数を垂直抗力の関数として定義する関数の識別子。 (整数) |
|
| Fric_s | 静的クーロン摩擦係数。 fct_ID3 = 0の場合: 一定の値(デフォルト = 0)。 fct_ID3 > 0の場合: 関数fct_ID2の縦軸スケールファクター(デフォルト = 1)。 (実数) |
|
| Xscale3 | 関数fct_ID3の横軸スケールファクター。 デフォルト = 1(実数) |
|
| Yscale4 | 関数fct_ID4の縦軸スケールファクター。 デフォルト = 1(実数) |
|
| Xscale4 | 関数fct_ID4の横軸スケールファクター。 デフォルト = 1(実数) |
コメント
- スリップリングは、最初にスリップリングに結合される2つのスプリングシートベルト要素El_ID1、El_ID2によって定義され、節点node_ID1によってスリップリングの位置が決定されます。2つの要素El_ID1とEL_ID2の間の共通節点は、node_ID1と同じ座標である必要があります。
- node_ID1とnode_ID2は、シートベルトスプリングコンポーネントの節点であってはいけません。
- デフォルトでは、スリップリングの回転軸は、
(2つの結合された要素によって定義される平面の法線方向)によって定義されます。 さらに、スリップリングの回転軸は、node_ID1とnode_ID2の方向によって定義できます。node_ID1とnode_ID2を結ぶ方向と が成す角度 を使用して摩擦が計算されます。
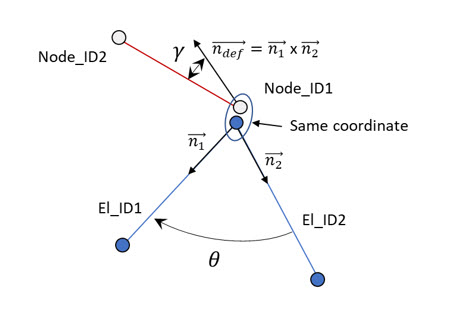
図 1. - クーロン摩擦係数は次のように計算されます:
(1) ここで、- 静止摩擦係数
- 動摩擦係数
- 相対滑り速度
これらはそれぞれ次のように計算されます:(2) (3) - スリップリングがロック解除されているときに、流れ(*付き)後の力の差異が流れなしで得られた力の差異より小さい場合、スライドがアクティブ化され、それに応じて材料の流れ
が計算されます:
ここで、
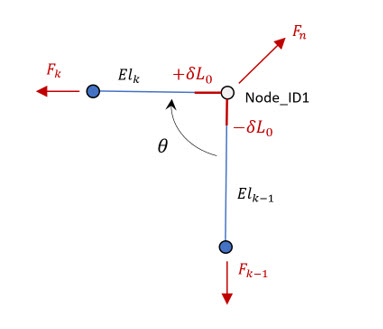
図 2. - スリップリングの2つのストランドの共通節点は、スリップリングnode_ID1の固定節点に運動学的に結合されています。他の運動条件は、スリップリング内に入ることができるシートベルト要素のどの節点にも適用できません。
- 1つのストランドの長さがゼロに達すると、スリップリングは更新されます。このストランドはスリップリングの反対側に再び現れ、その側にそれまで結合されていたストランドはスリップリングを離れます。同時に、新しいスプリングがスリップリング内に入り、移動したスプリングに取って代わります。固定節点の運動条件も、ストランドの新しい共通節点に切り替えられます。前の共通節点は、解放された要素の材料の流れと方向から計算された初速度で解放され、スリップリングの2つの方向
および
と角度
は、この更新によって変更されません。
(4) 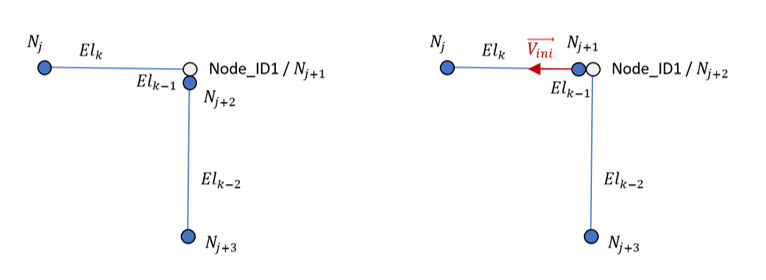
図 3. - 要素と時間ステップの安定性を確保するために、最大剛性値は、シートベルト材料(/MAT/LAW114)で定義された
とスプリング要素の基準長さ
から計算されます。
(5) - スプリング要素がスリップリング内にあるときは、粘性は非アクティブ化されます。