Joints
Use the Joints tool to create and edit basic joints.
Joints create lower pair constraints. A lower pair is an idealized form of constraint where the constraint can be represented using two reference frames, or coordinate systems, belonging to two different bodies. The origin, axis, or plane of one reference frame is said to be constrained with respect to the origin, axis, or plane of another reference frame. For example, a translation joint constraints a point on one body with regard to coordinate planes on another body. In this case, the point can only translate along a vector of the coordinate system. The body is said to have only a translation degree of freedom free, while the remaining two translational and all rotational degrees of freedom are restrained.
The figure below shows the various types of joints that are supported in HyperWorks:
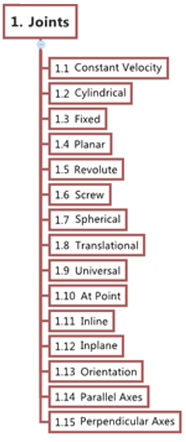
Figure 1.
- Compliant Joints
- Compliant joints are identical to bushings and allow relative motion in all six degrees freedom. The relative motion will be dependent on the stiffness and damping of the compliant joint. In order for a joint to be compliant, the Allow compliance option must be enabled at the time of joint creation.
- Non-compliant Joints
- Non-compliant joints act as pure constraints and allow relative motion only between the degrees of freedom of that particular joint type.
- Primitive Constraints
-
Joint Primitive Type Removes Number of Translational DOF Removes Number of Rotational DOF Removes Total Number of DOF Atpoint 3 0 3 Inline 2 0 2 Inplane 1 0 1 Orientation 0 3 3 Parallel Axis 0 2 2 Perpendicular 0 1 1 - Joint Constraints
-
Joint Type Removes Translational DOF Removes Rotational DOF Removes Total Number of DOF Ball 3 0 3 Constant Velocity 3 1 4 Cylindrical 2 2 4 Fixed 3 3 6 Planar 1 2 3 Point to Curve 2 0 2 Revolute 3 2 5 Translational 2 3 5 Universal 3 1 4