MV-1024:MotionSolveモデル内でのユーザーサブルーチンの使用
本チュートリアルでは、運動を定義する際のユーザーサブルーチンの利点について学びます。
ユーザーサブルーチンは、様々な理由で作成されます。例えば:
- 重要な論理的条件によって決定される物理現象を描写するため
- 複雑な式を明示的な形式で定式化することが実際困難な場合
- C/C++やFortranのようなプログラミング言語や、Tcl、Python、Rubyなどのインタープリターを使ったよりシンプルなプログラミングを最大限に活用するため
MotionSolveで自身のサブルーチンを使用するには、下記の手順に従います:
本演習に必要なモデルファイルPendu_model.mdlを、mbd_modeling\motionsolve自身の<working directory>にコピーしてください。
式を用いて運動を定義
-
ProjectブラウザでModelを右クリックし、を選択(またはツールバーからMotions
 を 右クリック)します。
を 右クリック)します。
-
Outputs
 をクリックし、Outputsパネルを表示させます。
出力リクエストを確認します。
をクリックし、Outputsパネルを表示させます。
出力リクエストを確認します。 -
Run
 をクリックし、Runパネルにアクセスします。
をクリックし、Runパネルにアクセスします。
-
Check
 をクリックし、モデリングエラーがないかをチェックします。
をクリックし、モデリングエラーがないかをチェックします。
MOTSUBユーザーサブルーチンを用いた運動の定義
本ステップでは、ユーザーサブルーチンMOTSUBを使用します。このユーザーサブルーチンは、DLL ms_csubdll.dll内でコンパイル、リンクされています。マシンレベルのこのDLLは、HyperWorksインストレーションに用意されています。Windows 64-bitプラットフォームの場合は、DLLは以下の場所にあります:<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\.
マシンレベルのDLLとして、ms_csubdll.dllを使用します。
-
環境変数MS_USERSUBDLLを作成し、値をDLLファイルにセットします。
-
Variable value:を<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dllに設定します。

図 1.
-
Variable value:を<installation_directory>\hwsolvers\motionsolve\usersub\subdll\win64\ms_csubdll.dllに設定します。
-
MotionViewモデルウィンドウ内で、これより前のステップからのPendu_model.mdlが開いたまま、Motionsパネルに進みます。
-
User-Definedタブをクリックし、
 テキストボックスに`USER(100001,5,2)`と入力します。
テキストボックスに`USER(100001,5,2)`と入力します。

図 2.注: 要素レベル(specific)のDLL/Interpreter関数を使用するには、Use local dll and function nameチェックボックスにマークを入れ、フォルダーアイコン を使ってDLLを指します。
を使ってDLLを指します。文字列
`USER(100001,5,2)`は、MOTSUBユーザーサブルーチンに引数を渡すために使用されます。MOTSUBユーザーサブルーチンは下記のとおりUSER(branch_id, par1, par2)内でパラメータpar1およびpar2を使って運動を計算します:motion_val= par1*TIME^par2 -
Run をクリックし、Runパネルにアクセスします。
-
Load model folderアイコン
 を使って、ファイルPendu_model_usersub.h3dを選択します。
を使って、ファイルPendu_model_usersub.h3dを選択します。
-
Applyをクリックします。
これで、既存のアニメーションが新しいアニメーションで上書きされます。
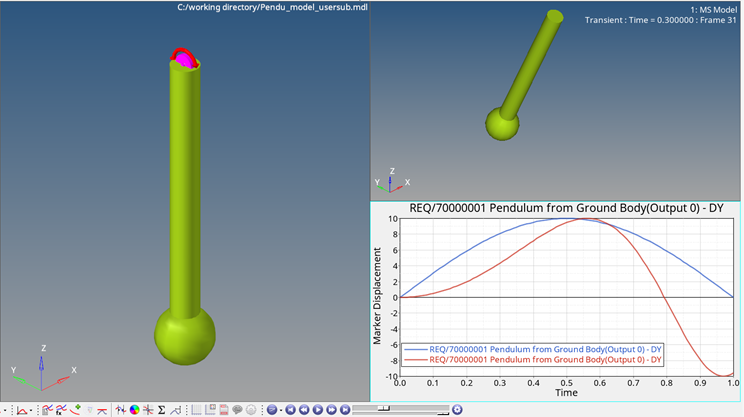
図 3.注: usrsub_param_stringの値が“USER(3.142, 1)”に設定されている場合、step 2からの結果はstep 1からの結果と同じになります。