MV-1030:MotionView GUIを用いたシステム定義の作成
本チュートリアルでは、MotionViewのグラフィカルユーザーインターフェースを用いてシステムを作成し、システム定義をファイルにエクスポートし、モデル内に保存された定義をインスタンス化する方法について学習します。
システムインスタンスの作成
このステップでは、システムインスタンスを作成します。
-
以下のいずれかの方法で、Add System/Assemblyダイアログを開きます:
- ProjectブラウザでModelを右クリックしてを選択します。
- Container Entityツールバーで、
 (System/Assemblyパネル)ボタンを右クリックします。
(System/Assemblyパネル)ボタンを右クリックします。
-
OKをクリックします。
これで、Pendulumシステム
 がモデルに追加され、システムのパネルに表示されます。
がモデルに追加され、システムのパネルに表示されます。
システムへのアタッチメントの追加

システムへのポイントの追加
このステップでは、Pendulumシステムにポイントを1つ追加します。
-
以下のいずれかの方法で、Add Point or PointPairダイアログを開きます:
- Pendulumを右クリックし、を選択します。
- Reference Entityツールバーで、
 (Points)アイコンを右クリックします。
(Points)アイコンを右クリックします。
-
ダイアログで、LabelをMass CG、Variableをp_cgと指定します。TypeがSingleにセットされていることを確認します。
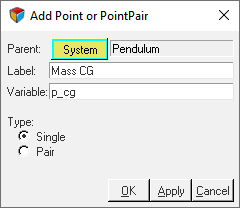
図 3. -
Propertiesタブから、X Coordinate欄をクリックします。
 ボタンをクリックします。
これで、Expression Builderが表示されます。
ボタンをクリックします。
これで、Expression Builderが表示されます。 -
Add ボタンをクリックします。
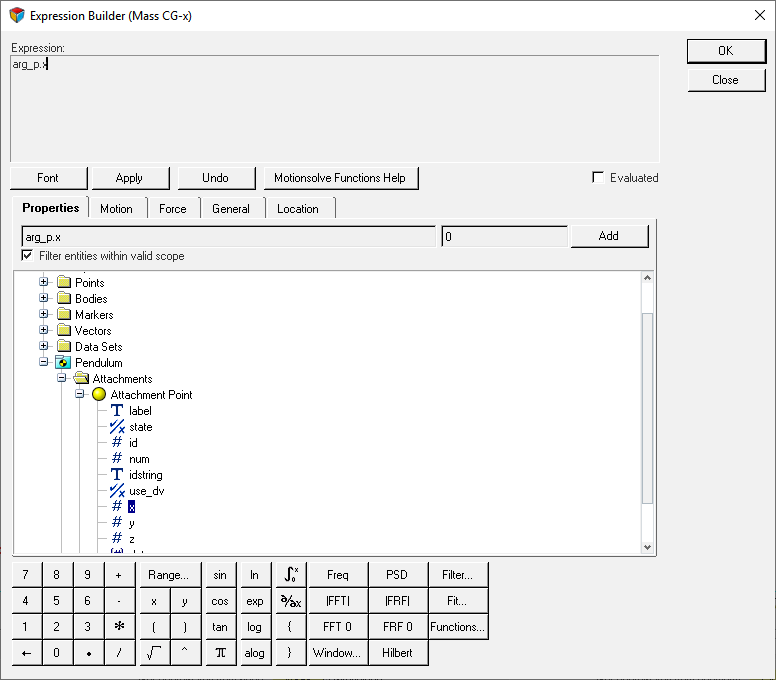
図 4.式arg_p.xが自動的にExpressionエリアを満たします。 -
式に+50を追加します。

図 5. -
YおよびZ座標について、手順5から10までを繰り返します。
-
Z座標について、式をarg_p.z+100と指定します。
注: あるいは、YおよびZ座標の式にX座標の式をコピーして編集してもかまいません。
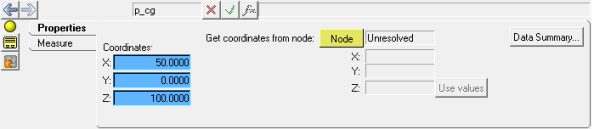
図 6.注: パラメトリックな式については、欄の背景色が変わります。
-
Z座標について、式をarg_p.z+100と指定します。
ボディへのアタッチメントの追加
このステップでは、Pendulumシステムにボディを1つ追加します。
-
以下のいずれかの方法で、Add Body or BodyPairダイアログを開きます:
- Pendulumを右クリックし、を選択します。
- Reference Entityツールバーで、
 (Bodies)アイコンを右クリックします。
(Bodies)アイコンを右クリックします。
-
Propertiesタブで、Massを1、Ixx、IyyおよびIzzのIntertia propertiesを1000と指定します。

図 7. -
Originの下の
 をダブルクリックします。
をダブルクリックします。
-
ダイアログでMass CGを選択し、OKをクリックします。

図 8.
システムへのグラフィックスの追加
このステップでは、Pendulumシステムにグラフィックスを追加します。
-
以下のいずれかの方法で、Add Graphics or GraphicPairダイアログを開きます:
- Pendulumを右クリックし、を選択します。
- Reference Entityツールバーで、
 (Graphics)アイコンを右クリックします。
(Graphics)アイコンを右クリックします。
-
Graphicsパネル内で、Connectivityタブを設定します。
-
Parentの下の
 コレクターをダブルクリックします。
コレクターをダブルクリックします。
-
Originの下のコレクターをダブルクリックします。
-
Directionの下のコレクターをダブルクリックします。
-
ダイアログでAttachment Pointを指定し、OKをクリックします。

図 9.
-
Parentの下の
-
GraphicsパネルのConnectivityタブの下で、Parent bodyにMass、Origin pointにMass
CGを指定します。
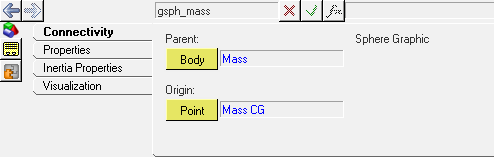
図 10. -
Propertiesタブで、Radiusに25と指定します。
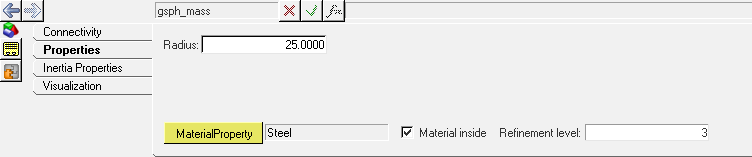
図 11.
システムへのジョイントの追加
このステップでは、Pendulumシステムに回転ジョイントを1つ追加します。
-
以下のいずれかの方法で、Add Joint or JointPairダイアログを開きます:
- Pendulumを右クリックし、を選択します。
- Reference Entityツールバーで、
 (Joints)アイコンを右クリックします。
(Joints)アイコンを右クリックします。
-
Jointパネル内、Connectivityタブで、
 をダブルクリックします。
をダブルクリックします。
-
 をダブルクリックします。
をダブルクリックします。
-
ダイアログで、フォルダーを拡張し、Attachment Bodyを選択します。
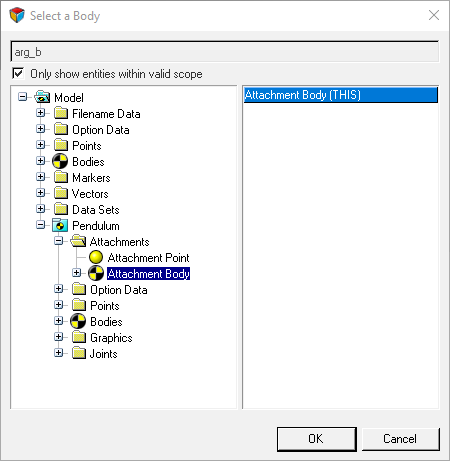
図 12.ヒント: また、Global Triadをクリックし、Attachment Bodyを介してGround Bodyをピックします。 -
Originの下のコレクターをダブルクリックします。
-
 をダブルクリックし、Global Yを選択します。
をダブルクリックし、Global Yを選択します。
-
 (Save model)をクリックし、ファイルをpend_gui.mdlとして、自身の<作業ディレクトリ>に保存します。
(Save model)をクリックし、ファイルをpend_gui.mdlとして、自身の<作業ディレクトリ>に保存します。
システム定義のエクスポート
このステップでは、モデルを自身の<作業ディレクトリ>に保存する方法について学習します。
-
Exportラジオボタンをクリックします。
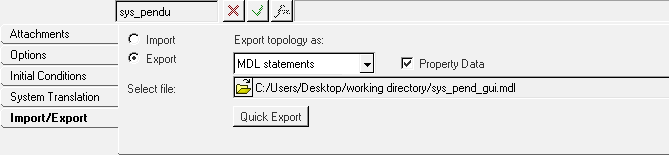
図 13. -
 (ファイルブラウザ)アイコンをクリックし、<作業ディレクトリ>をブラウズします。
(ファイルブラウザ)アイコンをクリックし、<作業ディレクトリ>をブラウズします。
システム定義のインスタンス化
このステップでは、システム定義をインスタンス化する方法について学習します。
-
(ファイルブラウザ)アイコンをクリックし、<作業ディレクトリ>をブラウズします。
-
sys_pend_gui.mdlファイルを選択し、Openをクリックします。
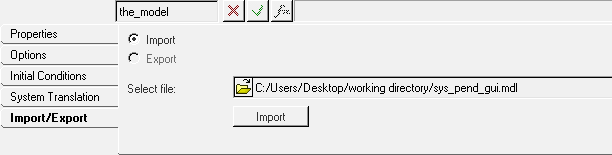
図 14. -
LabelをPendulum 2、Variableをsys_pendu_2に変更します。
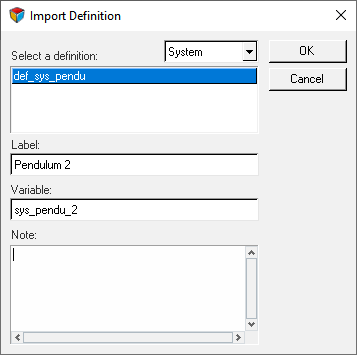
図 15. -
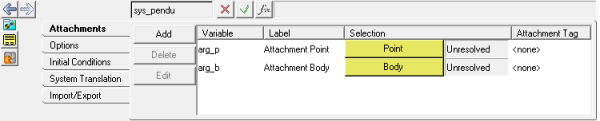
Attachmentsタブで、
 および
および アタッチメントとします。
アタッチメントとします。
-
コレクターをダブルクリックします。
-
モデルツリーでをクリックします。続いて、OKをクリックします。
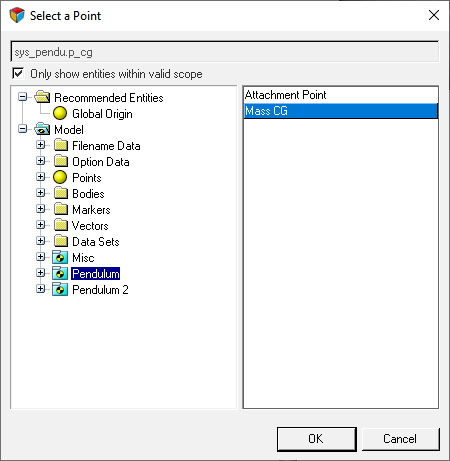
図 16. -
コレクターをダブルクリックします。
-
-
モデルをpend_2_gui.mdlとして<作業ディレクトリ>に保存します。
同じシステム定義は、同じモデルまたは異なるモデル内で何度でもインスタンス化して再利用することが可能です。