MV-1080:MDLを用いたアナリシスの作成
本チュートリアルでは、アナリシス定義の作成と、MDLファイル内でのアナリシス定義のインスタンス化について学習します。
アナリシス定義は、これらのキーの違いを除くと、シンタックスとその使用法についてはシステム定義と類似しています:
- システム定義には*DefineSystem()を使用しますが、アナリシス定義には*DefineAnalysis()を使用します。
- アナリシスは、トップレベルのモデルの下でのみインスタンス化が可能
- 所与のインスタンスにおいてモデル内で1つのアナリシスのみがアクティブになり得る
アナリシス定義ブロックは*DefineAnalysis()で始まり、*EndDefine()で終わります。このブロック内で定義されたすべてのエンティティは、アナリシス定義の一部であるとみなされます。*DefineAnalysis()のシンタックスは下記のとおりです:
*DefineAnalysis(ana_def_name, arg_1,arg_2, ..., arg_n)ana_def_nameはアナリシス定義の変数名で、このアナリシスのインスタンス生成の間に使用されます。arg_1,arg_2...arg_nは、アタッチメントとしてアナリシス定義に渡される引数のリストです。
表 1 は、MDLファイル内のアナリシス定義およびそれに続くインスタンス化を示しています。アナリシス定義ファイルとモデルファイルの2つが、スタディ下の特定のアナリシスをインスタンス化する際に機能します。例の中で一部の語は、これらファイル間の幾つかの主要な関係に焦点を当てるため、太字で記されています。
| Reference Numbers | System Instantiation with Definition |
|---|---|
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
表 2
は、アナリシス定義とMDLモデルファイル内のインスタンスとの関係を示したものです。
| 変数 | Relationship |
|---|---|
j_joint_att |
アナリシス定義ファイルの*Attachment()ステートメント(行4)で宣言され、*DefineAnalysis()ステートメント(行3)に引数として現れるアタッチメントの変数名。モーションは、*Motion()ステートメント(行6)を使ってこのジョイントに適用されます。 |
ana_def |
アナリシス定義の変数名は、*DefineAnalysis()ステートメント(行3)内で指定されます。アナリシス定義は、ana1によって*Analysis()ステートメント(行2)内で使用されます。 |
アナリシス定義ファイルの作成
このステップでは、アナリシス定義ファイルを作成します。
構造の固有振動数を推算するための試行的手法では、推進力またはトルクへの応答を測り、フーリエ変換を用いて周波数領域内の応答に注目します。周波数応答のピークは、固有振動数を表わします。本チュートリアルでは、アナリシスを生成してこのテストプロシージャをシミュレーションします。アナリシスは、システムへの推進トルクを適用し、応答を測ります。
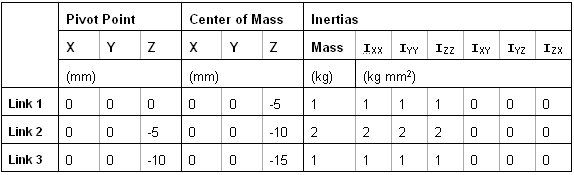
図 2. 三重振子のプロパティ一覧
- 以下の関数式を使って、x軸についての推進トルクを作成します:
Tx = step(TIME,.3, 0, .31, 10) + step(TIME, .31, 0, .32, -10) - このアナリシスを応用し、図 1に示す三重振子モデルの固有振動数を推算します。
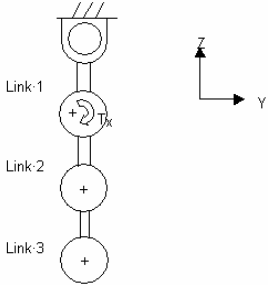
図 1. 平衡状態にある三重振子の詳細図
図 2. 三重振子のプロパティ一覧
本演習では、以下の4つのMDLステートメントが使用されます:
*Attachment()
*ActionReactionForce()
*SetForce()
*Output() 注: 上記のMDLステートメントのシンタックスについては、MotionView Reference Guide(HyperWorks Desktop Reference Guide内)をご参照ください。
モデル内のアナリシスのインスタンス生成
このステップでは、三重振子モデル内でアナリシスをインスタンス化します。
-
 (ファイルブラウザ)をクリックし、analysis.mdlを選択します。続いて、Importをクリックします。
(ファイルブラウザ)をクリックし、analysis.mdlを選択します。続いて、Importをクリックします。
-
Select a definitionドロップダウンメニューがAnalysisにセットされていることを確認します。
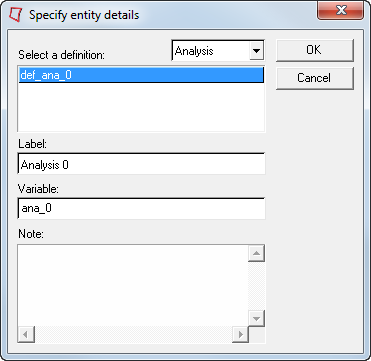
図 3. -
ジョイントのアタッチメントを指定します。
-
Attachmentsタブで、
 をダブルクリックします。
をダブルクリックします。
-
三重振子のピボットジョイントの1つを選択します。

図 4.
-
Attachmentsタブで、
-
モデルを実行します。
-
 (Run)パネルボタンをクリックします。
(Run)パネルボタンをクリックします。
- パネル内で、End timeを1.0に、Print intervalを0.01と指定します。
- Runをクリックします。
-
-
 (Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。
(Start/Pause Animation)ボタンをクリックし、アニメーションを見ます。