演習2:Systems/Assemblyパネルからのシステムの追加
本演習では、Systems/Assemblyパネルを使ってMotionSolveグラフィカルユーザーインターフェースからシステムをインスタンス化する方法を説明します。
- (演習1:システム定義の作成と使用からの)二重振子モデルに別の振子リンクを追加し、図 1に示すような三重振子を作成します。
- シミュレーションを実行し、アニメーションを確認します。
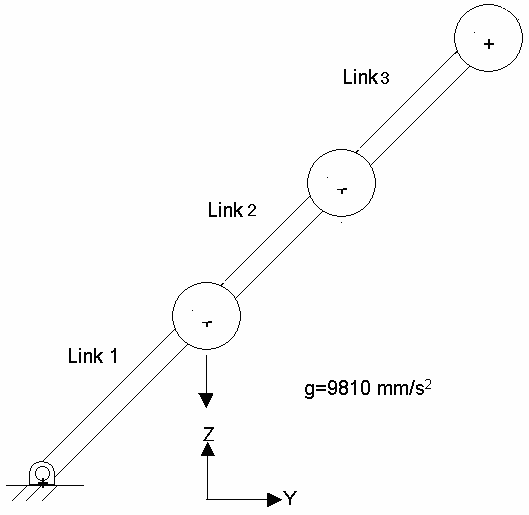
図 1. 三重振子
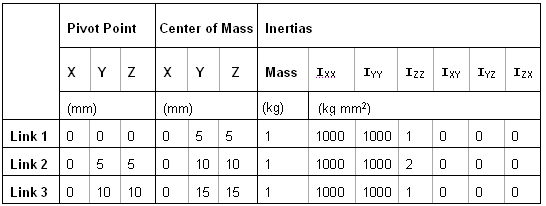
図 2. 三重振子のプロパティ一覧
MotionViewからのシステム定義の追加
このステップでは、MotionViewからシステム定義をモデルに追加する方法について学習します。
-
 (ファイルブラウザ)をクリックし、先ほど作成したsys_pendu.mdlシステムを選択します。
(ファイルブラウザ)をクリックし、先ほど作成したsys_pendu.mdlシステムを選択します。
-
Importをクリックします。
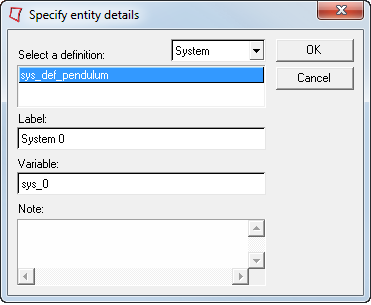
図 3.
アタッチメントの選択とポイントの更新
このステップでは、MotionViewのグラフィカルユーザーインターフェースを使って、モデル内のアタッチメントの選択とポイントの更新を行います。
-
3番目の振子のリンクを、振子システムの2番目のリンクに付加します。

図 4. -
Attachmentsタブで、Attachmentボディ用の
 コレクターをダブルクリックします。
コレクターをダブルクリックします。
-
Pivot Point用の
 コレクターをダブルクリックします。
コレクターをダブルクリックします。
-
MotionSolveを実行し、結果を確認します。
重要: 定義は独立していなくてはなりません。したがって、*DefineXXXブロックには別の*DefineXXXブロックが含まれていてはいけません。図 5の左側には、別の*Defineブロック内にある*Defineブロックが示されています。このような定義はネスト化された定義と呼ばれ、読み込み中にMotionViewでエラーとなる場合があります。図 5の右側は、定義の正しい置き方を示しています。
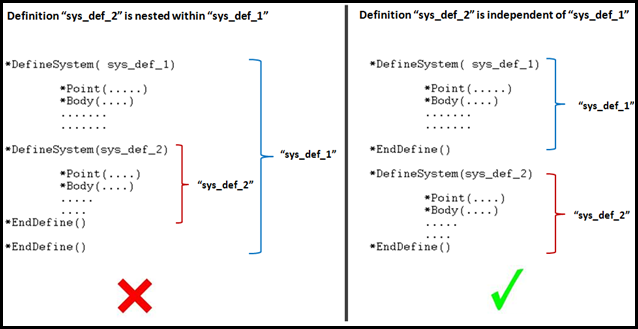 図 5.
図 5.