複数入力ファイルフォーマット
モデルの設定

図 1.
ドメイン間の結合
2つのドメイン間の結合(またはリンク)は、必ず、相互に結合される対応する2つのメッシュに関連する2つの節点グループ、およびこの結合の種類によって定義されます。以下はRAD2RADで利用可能な結合タイプのリストです。
タイプ1: シェルとシェル(Schur Dual法)
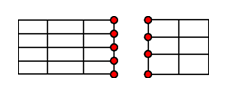
図 2.
タイプ2: シェルとビーム(Schur Dual法)
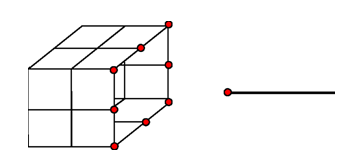
図 3.
タイプ4:節点と節点(Schur Primal法)
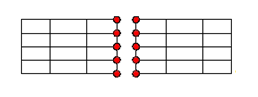
図 4.
この方法は適合メッシュに対するタイプ1と厳密に等価ですが、マトリックスの重ね合わせもその逆行列が実行されないため大幅に少ないCPU時間消費で済みます。また、この場合は、節点データのみが必要となるため、どの種類の節点を結合するためにも使用できます(どの種類の要素にも結合される)。
ドメイン間の接触
TYPE 5: 結合
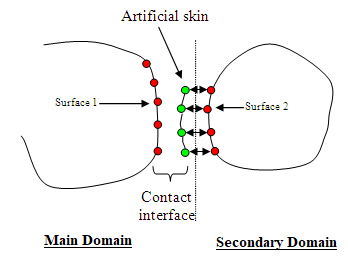
図 5.
/LINK/TYPE5
Main_Domain Link_Id1
Second_Domain Link_Id2- /INTER/TYPE5
- /INTER/TYPE7
- /INTER/TYPE10
- /INTER/TYPE11
- /INTER/TYPE18
- /INTER/TYPE24 ((surf_ID1 > 0, surf_ID2 > 0)または(surf_ID1 > 0, surf_ID2 = 0)の場合)。(grnd_IDs > 0, surf_ID1= 0, surf_ID2 > 0)ではない場合。
質量と節点剛性はRAD2RADの結合タイプ5によりセカンダリドメインから人工表皮へと伝達されます。したがって、メインドメインでの質量と節点時間ステップの修正が計算の最初で見られます。
/LINK/TYPE5
Main_Domain Link_Id1
Second_Domain Link_Id2- 剛体の複製の場合には、そのメイン節点はRAD2RAD結合タイプ5に指定される必要があります。
- インターフェースタイプ2の複製の場合、追加のフラグ/TIEDがRAD2RAD入力ファイル内で指定される必要があります。
RAD2RAD はインターフェース/INTER/LAGMUL/TYPE2と/RWALL/LAGMULのようなLagrange乗数法の運動条件とは適合しません。
データ入力
Starter入力ファイル
/EXTERN/LINK/Link_ID
title
gr_ID- gr_ID
- 他のドメインとの境界の節点を定義する節点グループ識別子
- Link_ID
- リンク識別子
Radiossモデルの外部リンクの数には制限がありません。唯一の制限は、異なるリンクに共通の節点を含めないことです。それぞれのリンクは、現在のモデルと外界との間のインターフェースを定義します。
Engine入力ファイル
/RAD2RAD/ONCPUの割り当て
Radiossドメインは交互に取り扱われるため、同時に実行されるRadiossプロセスは1つだけになります。全てのCPUリソースはRAD2RADによって自動的に実行中Engineプロセスに割り当てられ、他のプロセスはCPUを消費しない待機モードになります。これは、利用可能な同じCPUリソースすべてをその計算中に各ドメインに割り当てる必要があることを意味します。
マルチドメイン解析の起動
マルチドメイン計算の起動には、マニュアルとスクリプトによる2つの方法があります。
より簡単なマルチドメイン計算の起動はスクリプトを用いることです。
RAD2RAD並列化
-ntを使用して指定するか、RAD2RAD入力ファイルでキーワード/PROC/nthreadを使用して直接指定できます。MPIの設定
- HP-MPI: MPI_FLAGSをy0に設定
- Open-MPI: OMPI_MCA_mpi_yield_when_idleを1に設定
- Intel-MPI: デフォルトの設定を用いることが可能
出力ファイル
- Radioss: 別々の出力ファイルがそれぞれのRadiossプロセスにより生成されます。
- RAD2RAD:rad2rad.outという名の特別な出力ファイルがRAD2RADにより生成されます。
現在のバージョンの制限
- それぞれのサブドメインは、完全なものとして構成されます。それぞれの完全な入力ファイルを使って、Radiossモデルを分離します。
- Radiossプロセスとメインプログラムの間のデータ通信には、通信のパイプシステム法を用います。全てのRadioss EnginesとRAD2RADは同じハードウエアノードで開始される必要があります。
- ドメイン間の共通節点での運動条件は、結合TYPE5とのみ適合します。
- RAD2RADプログラムは、複数入力ファイル設定の場合は並列化されません。このことで、大きなサブドメインが多くのCPU数で実行される時、マルチドメイン計算のパフォーマンスが下がる可能性があります。
- 現在、マルチドメイン計算はメインプログラムから自動実行はされません。全てのRadioss StartersはRAD2RADプログラムが起動される前に実行される必要があります。バッチ計算は可能ですが、 RAD2RADと全てのRadioss Engineプロセスは1つのハードウエアノードで独立、並列に起動される必要があります。
- それぞれのRadiossドメインでは、リンクの数は15に、CPUの数は128に制限されています。
例:RAD2RAD入力ファイル
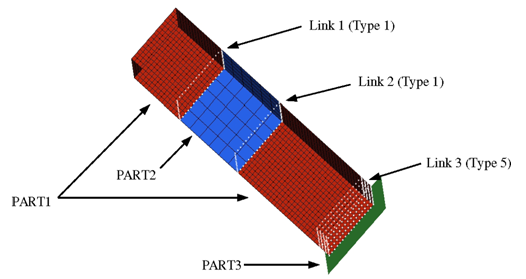
図 6. モデル
RAD2RAD入力ファイル
$===============================================================
$ RAD2RAD R8 INPUT FILE :
$===============================================================
$ 1. PARTS DEFINITION
$===============================================================
/DOMAIN/PART1
1 2 3
/DOMAIN/PART2
4 5
/DOMAIN/PART3
9
$===============================================================
$ 2. INTERFACES DEFINITION
$===============================================================
/LINK/TYPE1
PART1 2
PART2 5
/LINK/TYPE1
PART1 1PART2 4
/LINK/TYPE5
PART3 9
PART1 3
$===============================================================
$3 OPTIONS
$===============================================================
/MLTPS/ON
0.1 0.1
/MESHL/MORFIN
/RADIUS/1e-7
/END $===============================================================